
基础篇:SciPy库求解微分方程模型数值解方法
前言
0.1 为什么用微分方程建模
微分方程是描述变化率的数学语言。在现实世界中,绝大多数现象的本质不是静态的"是什么",而是动态的"怎么变"——人口的增长速率、疾病的传播速度、弹簧的振动频率、化学反应的消耗速率……这些都可以用微分方程精确刻画。
数学建模竞赛中,微分方程模型是最核心、最高频的题型之一。掌握微分方程的数值求解能力,意味着你可以将复杂的现实问题转化为可计算的模型。
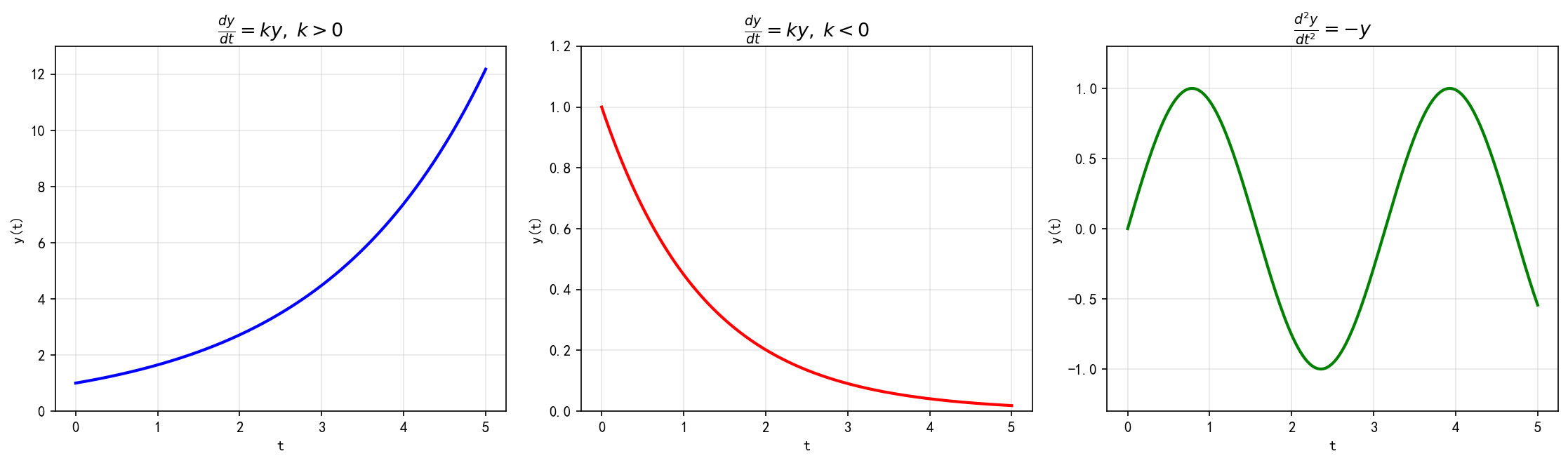
上图展示了三种典型的微分方程解曲线:
左图:,指数增长模型。增长率与当前值成正比,解为 。适用于无限制条件下的种群增长、复利计算等场景。
中图:,指数衰减模型。适用于放射性衰变、冷却过程、药物代谢等。
右图:,简谐振动方程。解为正弦函数,描述了弹簧振子、单摆小角度摆动等周期运动。
这三种方程虽然简单,但它们是构建复杂模型的基石。后续章节中,你会看到更复杂的模型本质上都是这些基本模式的组合与扩展。
0.2 常用微分方程模型预览
在数学建模中,以下两类模型极为常见:
左图 — Lotka-Volterra 捕食者-猎物模型:
其中 x 为猎物数量,y 为捕食者数量。猎物有自然增长率 α,被捕食率为 βxy;捕食者因捕食而增长 δxy,自然死亡率为 γy。
右图 — SIR 传染病模型:
S 为易感者,I 为感染者,R 为康复者。β 为感染率,γ 为康复率。这是新冠疫情期间被广泛讨论的经典模型。
这两类模型都是耦合的常微分方程组,通常没有解析解,必须借助数值方法求解——这正是本教程要解决的问题。
0.3 教程结构
本教程以 SciPy 的 solve_ivp 为核心工具,系统讲解常微分方程的数值求解方法:
0.4 环境配置
依赖安装
pip install numpy scipy matplotlib
版本要求
solve_ivp 在 SciPy 1.0+ 中引入,是官方推荐的 ODE 求解接口(旧的 odeint 已被标记为 legacy)。
可视化中文适配
本教程所有示例均配置了 matplotlib 中文支持:
import matplotlib.pyplot as plt
plt.rcParams.update({
'font.sans-serif': ['SimHei', 'Microsoft YaHei', 'DejaVu Sans'],
'axes.unicode_minus': False,
})
SimHei(黑体)和Microsoft YaHei(微软雅黑)是 Windows 系统自带的中文字体axes.unicode_minus确保负号正常显示
验证安装
import numpy as np
import scipy
import matplotlib
print(f"NumPy: {np.__version__}")
print(f"SciPy: {scipy.__version__}")
print(f"Matplotlib: {matplotlib.__version__}")
确保运行后版本号满足上述要求,即可开始后续章节的学习。
0.5 前置知识
阅读本教程需要具备:
高等数学基础:导数、积分、泰勒展开的基本概念
线性代数基础:向量、矩阵、特征值
Python 编程:熟悉 NumPy 数组操作、基本的数据可视化
ODE 基本概念:了解什么是微分方程、初值问题、解析解与数值解的区别
不需要深入的数学分析背景——教程中的所有数学内容都会配合代码和可视化进行直观解释。
0.6 解析解 vs 数值解
现实情况:绝大多数建模问题中的微分方程没有解析解,或者解析解形式过于复杂而不实用。数值解法是唯一可行的途径。
本教程的重点就是:给定一个微分方程(组),如何用 SciPy 高效、准确地求出数值解,并用直观的可视化呈现结果。
第1章 初识 solve_ivp
1.1 为什么选择 solve_ivp
SciPy 1.0 引入了 solve_ivp 作为求解常微分方程初值问题的统一接口。在 scipy 1.0 之前,最常用的函数是 odeint,但它已被标记为 legacy,不再推荐使用。
solve_ivp 的优势:
统一的函数签名:所有求解方法共享同一套 API
多种求解器:支持显式 Runge-Kutta、BDF、Radau 等不同算法
事件检测:可以在求解过程中检测特定事件(如到达某个状态)
密集输出:提供任意时间点的连续插值
from scipy.integrate import solve_ivp
import numpy as np
# solve_ivp 的最简调用
# 求解 dy/dt = 0.5*y, y(0) = 1
def exp_growth(t, y, k):
return k * y
sol = solve_ivp(exp_growth, [0, 5], [1.0], args=(0.5,), dense_output=True)
print(f"时间步: {sol.t}")
print(f"解: {sol.y[0]}")
print(f"状态: {sol.message}")
输出:
时间步: [0. 0.03138145 0.13825591 0.32678526 0.63876289 1.05884731
1.60909647 2.29634592 3.19885228 4.46787954 5. ]
解: [ 1. 1.01594513 1.07141356 1.17396838 1.37110218 1.69380744
2.39031659 3.71374384 6.39638404 12.18494287 14.84131591]
状态: The solver successfully reached the end of the integration interval.
1.2 函数签名详解
scipy.integrate.solve_ivp(fun, t_span, y0, method='RK45',
t_eval=None, dense_output=False,
events=None, args=None,
rtol=1e-3, atol=1e-6,
max_step=0.0)
返回的 Bunch 对象包含以下重要字段:
sol.t # 时间点数组(求解器实际选择的时间步)
sol.y # 解数组,sol.y[i] 对应第 i 个方程在所有时间点的解
sol.t_events # 各事件触发的时间点列表
sol.success # 布尔值,求解是否成功
sol.message # 求解状态描述
sol.nfev # 右端函数的调用次数(性能指标)
sol.sol # 密集输出插值函数(仅当 dense_output=True)
1.3 指数增长模型
1.3.1 问题描述
最简单的 ODE——指数增长模型:
其解析解为 。当 k>0 时呈指数增长,k<0 时呈指数衰减。
from scipy.integrate import solve_ivp
import numpy as np
def exp_growth(t, y, k):
return k * y
# 求解
t_span = [0, 5]
y0 = [1.0]
sol = solve_ivp(exp_growth, t_span, y0, args=(0.5,), dense_output=True)
# 与解析解对比
t_fine = np.linspace(0, 5, 200)
y_numerical = sol.sol(t_fine)
y_analytical = np.exp(0.5 * t_fine)
1.3.2 数值精度验证
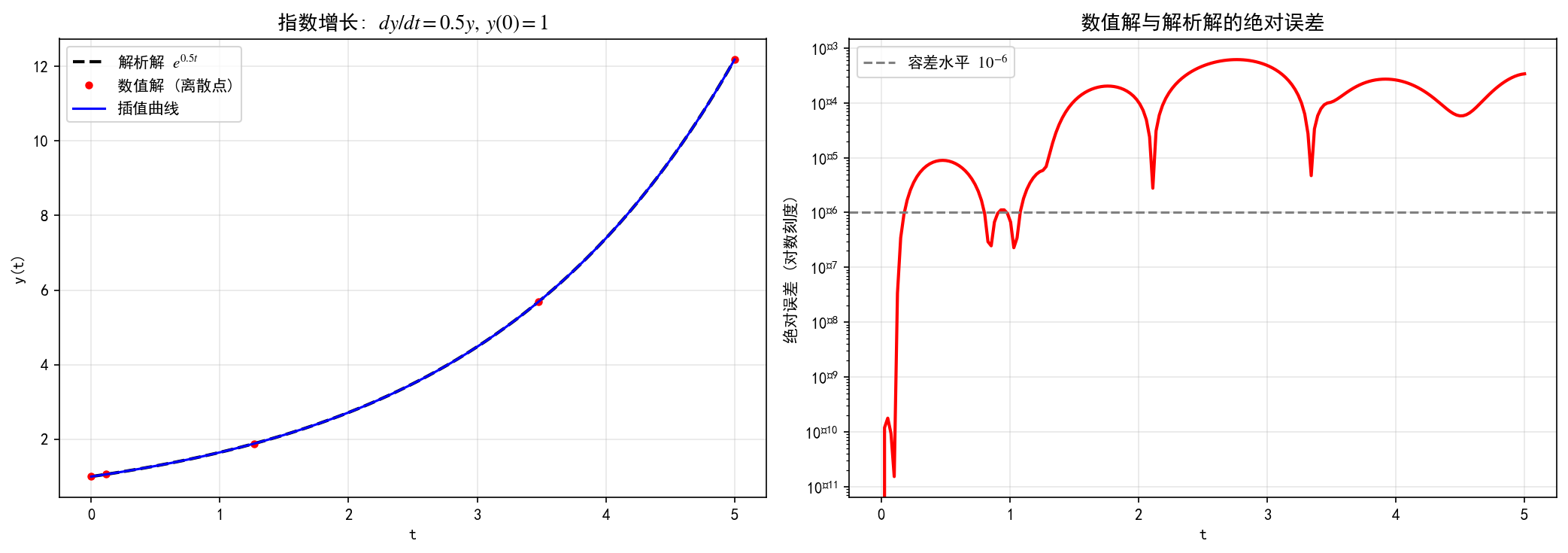
左图展示了求解器的输出行为:
蓝色插值曲线:通过
dense_output=True获得的连续解,与解析解(黑色虚线)几乎完全重合红色圆点:求解器自适应选择的实际计算点——注意这些点不是均匀分布的,
solve_ivp会根据解的变化率自动调整步长。在增长较快的区域(tt 较大时)步长更大,在增长较慢的区域(tt 较小时)步长更密集总共只用了 11 个计算点就达到了高精度,这就是自适应步长的威力
右图展示了数值解与解析解的绝对误差(对数刻度):
误差普遍在 10−6量级以下,远低于默认的相对容差
rtol=1e-3误差曲线上的周期性尖峰反映了自适应步长算法的步长调整过程——每当求解器估计误差超过阈值时,就会减小步长重新计算,导致误差骤降
误差在 t 较大时略有增长,这是因为指数增长放大了累积误差
1.3.3 放射性衰变——指数衰减的应用
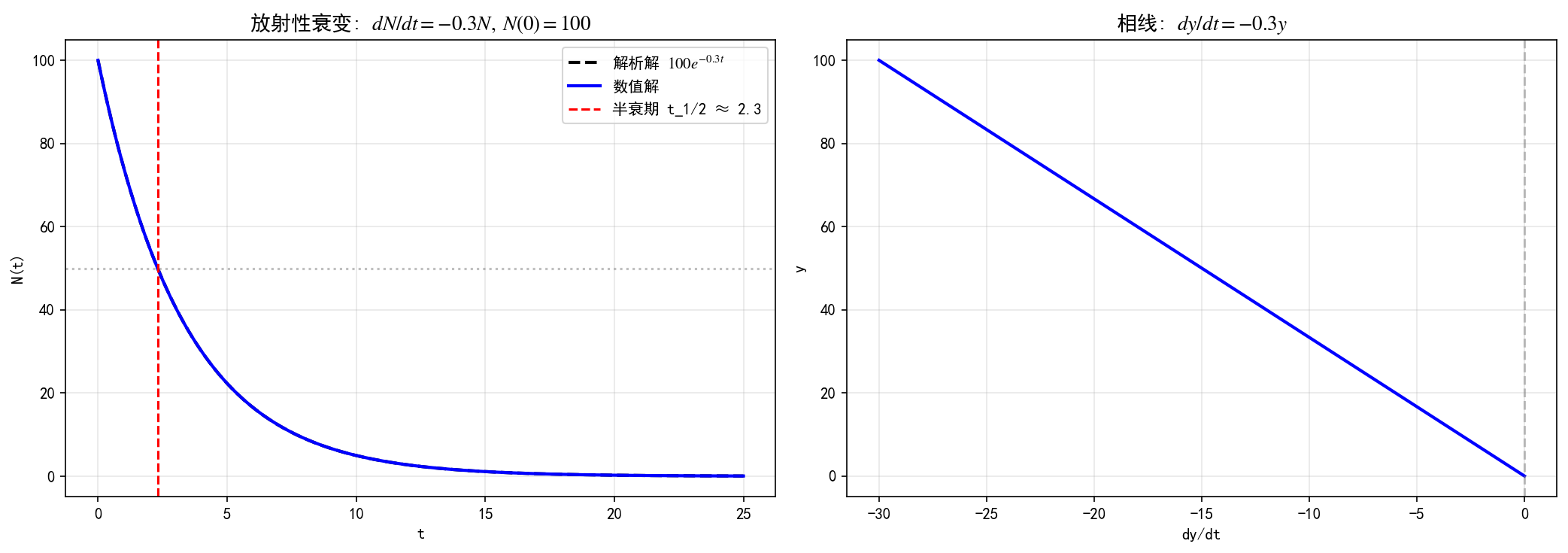
左图展示了放射性衰变模型 dN/dt=−λN,N(0)=100,其中 λ=0.3:
蓝色曲线(数值解)与黑色虚线(解析解)完全重合,肉眼无法区分
红色虚线标记了半衰期 t1/2=ln2/λ≈2.3——此时原子核数量恰好减少一半
经过约 4 个半衰期(t≈9.2),剩余量已不足初始值的 7%;经过 10 个半衰期后,几乎完全衰变殆尽
右图是相线(Phase line)——一种一维的相图,横坐标为 dy/dt,纵坐标为 y:
直线斜率为负,表示 y 越大,下降越快
当 y→0 时,dy/dt→0——零点是系统的平衡点(不动点),一旦到达就不会再变化
相线分析是理解微分方程定性行为的有力工具,后续章节中会扩展到二维相图
1.4 不同求解器方法的对比
solve_ivp 内置了五种求解方法:
1.4.1 Logistic 增长模型
用 logistic 增长模型来对比各方法的精度:
其中 r=2.0 为增长率,K=10.0 为环境承载力。其解析解为:
from scipy.integrate import solve_ivp
import numpy as np
def logistic(t, y, r, K):
return r * y * (1 - y / K)
r, K = 2.0, 10.0
y0 = [0.5]
# 对比三种显式方法
for method in ['RK45', 'RK23', 'DOP853']:
sol = solve_ivp(logistic, [0, 5], y0, args=(r, K),
method=method, rtol=1e-6, atol=1e-9, dense_output=True)
print(f"{method}: {sol.nfev} 次函数调用")
输出:
RK45: 158 次函数调用
RK23: 371 次函数调用
DOP853: 173 次函数调用
1.4.2 精度与效率分析
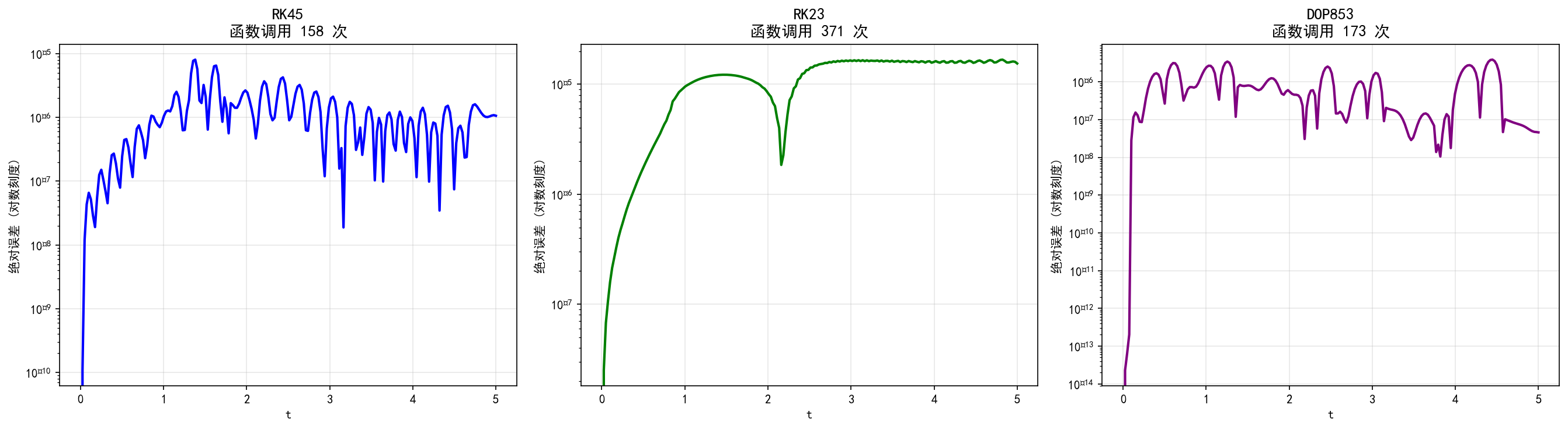
上图对比了三种显式方法在同一问题上的表现(均设置 rtol=1e-6):
左图 RK45:误差在 10−6∼10−8之间波动,函数调用 158 次,是默认方法的最佳平衡
中图 RK23:误差约在 10−5量级,但函数调用高达 371 次——低阶方法在相同精度下需要更小的步长,反而更慢
右图 DOP853:误差约在 10−7∼10−8之间,函数调用 173 次——高阶方法每步开销大,但步长可以更大,综合效率优秀
选择建议:
默认用 RK45——大多数非刚性问题的最佳选择
需要更高精度时尝试 DOP853——虽然每步开销大,但总步数少
避免用 RK23——在相同精度下通常不如 RK45 高效
遇到求解器报错或步长过小的警告时,可能是刚性问题,改用 BDF 或 LSODA(第4章详细讲解)
1.5 t_eval 参数的使用
solve_ivp 默认只在求解器自适应选择的时间点输出解,但有时你需要在特定时间点获得解值:
# 方法1:用 t_eval 指定输出时间点
sol = solve_ivp(exp_growth, [0, 5], [1.0], args=(0.5,),
t_eval=np.linspace(0, 5, 50))
print(f"输出 {len(sol.t)} 个点") # 50 个点
# 方法2:用 dense_output 进行任意点插值
sol = solve_ivp(exp_growth, [0, 5], [1.0], args=(0.5,), dense_output=True)
# 在任意时间点求值(甚至超出积分区间,但外推不可靠)
t_query = [0.5, 1.5, 2.5, 3.5, 4.5]
y_query = sol.sol(t_query)
推荐做法:通常 dense_output=True 更灵活,且插值精度足够高(对于 RK45 等方法是 4 阶 Hermite 插值)。
1.6 实用技巧速查
1.7 本节小结
solve_ivp是 SciPy 1.0+ 推荐的 ODE 求解接口,统一了所有求解方法的 API基本调用格式:
solve_ivp(fun, [t0, tf], y0, args=(), method='RK45')函数签名必须是
f(t, y, *args) → dydt,其中y是数组,即使只有一个方程返回值
sol.t是求解器自适应选择的时间步,不等于t_span的等分点dense_output=True返回连续插值函数sol.sol(t),可在任意时间点查询rtol和atol控制精度——减小它们可以获得更高精度但计算更慢nfev(函数调用次数)是衡量求解效率的关键指标默认
RK45适用于大多数非刚性问题,遇到报错时考虑 BDF 或 LSODA
第2章 高阶方程降阶
2.1 核心思想:降阶为方程组
solve_ivp 只能求解一阶常微分方程或一阶方程组。对于 n 阶 ODE:
标准降阶技巧:引入新变量 ,得到等价的一阶方程组:
初始条件也相应转换为:。
from scipy.integrate import solve_ivp
import numpy as np
# 示例:二阶方程 y'' + y = 0, y(0)=1, y'(0)=0
# 降阶:令 y1=y, y2=y'
# 得方程组:y1' = y2, y2' = -y1
def harmonic(t, y):
y1, y2 = y
return [y2, -y1]
sol = solve_ivp(harmonic, [0, 10], [1.0, 0.0], dense_output=True)
2.2 阻尼谐振子
2.2.1 物理模型
质量为 m 的物体通过劲度系数为 k 的弹簧连接到墙壁,并受到与速度成正比的阻尼力 −cv:
令 ,降阶为一阶方程组:
def harmonic_oscillator(t, state, m, c, k):
x, v = state
return [v, (-c * v - k * x) / m]
m, c, k = 1.0, 2.0, 10.0
y0 = [1.0, 0.0] # x(0)=1, v(0)=0
sol = solve_ivp(harmonic_oscillator, [0, 10], y0, args=(m, c, k))
2.2.2 三种阻尼状态
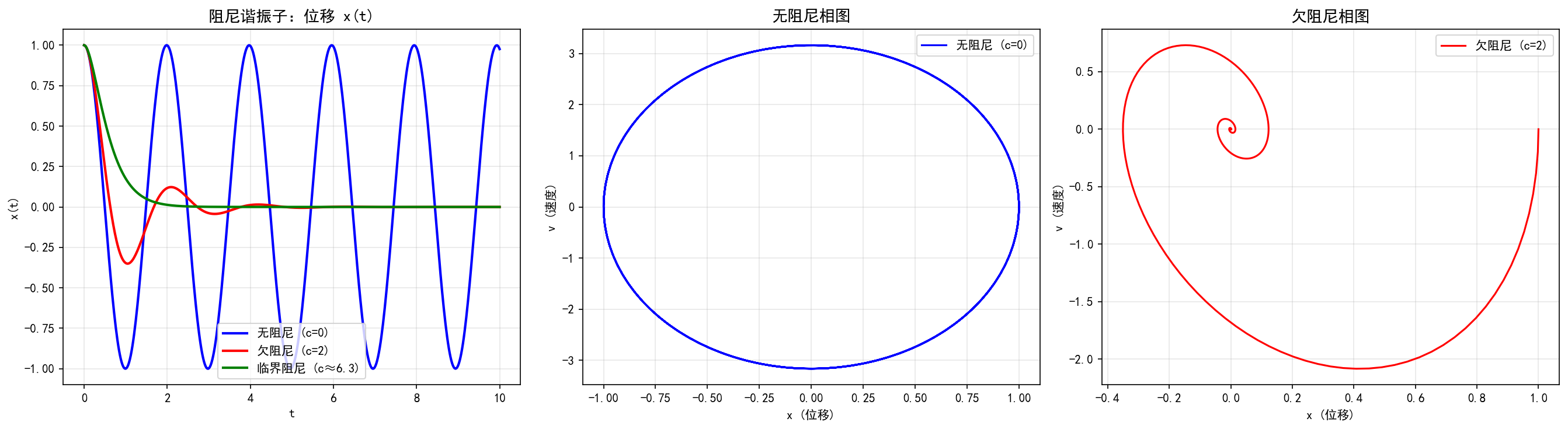
左图比较了三种阻尼情形下的位移响应 x(t):
无阻尼(蓝色):c=0,系统以固有频率 做等幅振荡,永不衰减
欠阻尼(红色):,系统振荡但振幅逐渐衰减
临界阻尼(绿色):c=ccr,系统最快地回到平衡位置且不振荡——这是实际工程中(如汽车减震器)追求的最优阻尼
中图和右图是相图(phase portrait)——将位移 x 作为横坐标、速度 v 作为纵坐标,展示系统状态在相空间中的轨迹:
无阻尼相图:闭合的椭圆轨道——系统能量守恒,状态在相空间中循环往复
欠阻尼相图:向内螺旋的曲线——每次振荡都损失能量,最终收敛到原点 (0,0)
相图是分析非线性系统的核心工具——后续章节中的捕食者-猎物模型、传染病模型都要用相图来理解系统的全局行为。
2.3 单摆方程
2.3.1 从线性到非线性
单摆的运动方程是经典的二阶非线性 ODE:
其中 θ 为摆角,g 为重力加速度,L 为摆长,b 为阻尼系数。
小角度近似下 sinθ≈θ,方程退化为线性谐振子。但大角度时必须保留非线性项——这正是数值方法的优势所在:解析解只对线性方程容易获得,而非线性方程可以直接数值求解。
降阶后的一阶方程组:
def pendulum(t, state, g, L, b):
theta, omega = state
return [omega, -(g / L) * np.sin(theta) - b * omega]
g, L, b = 9.8, 1.0, 0.2
sol = solve_ivp(pendulum, [0, 20], [np.pi / 3, 0], args=(g, L, b))
2.3.2 不同初始角度的行为
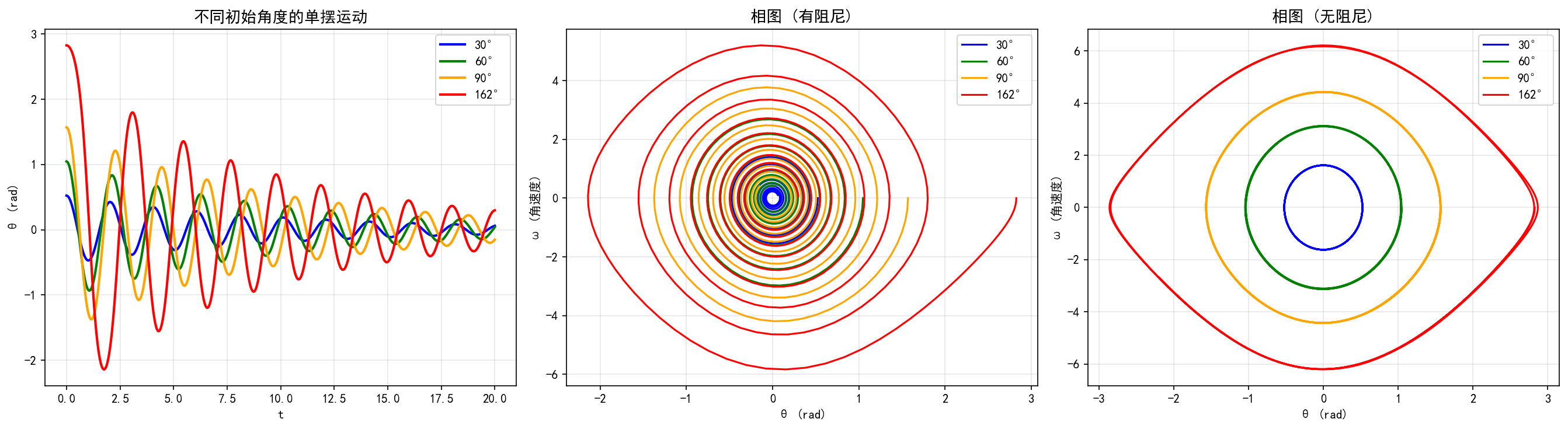
左图展示了从不同初始角度释放的单摆运动(有阻尼 b=0.2):
小角度(30°、60°):运动接近简谐振动,周期几乎不变
大角度(90°、162°):周期明显变长,波形偏离正弦——这就是非线性效应
162° 的红色曲线在 t=0 附近有较大的初始速度变化——摆从接近倒立的位置释放,开始阶段运动很快
中图是有阻尼相图:所有轨迹都螺旋收敛到 (0,0)——无论初始条件如何,摆最终都会静止在最低点。
右图是无阻尼相图:闭合轨道,系统能量守恒。值得注意的是:
小角度轨道接近圆形(近似简谐振动)
大角度轨道呈蛋形——非线性导致相空间轨道变形
最外层的红色轨道接近分界线(separatrix)——这是摆从振荡运动过渡到旋转运动的能量边界。超过这条边界的轨迹将变成绕定点旋转而非摆动
2.4 受迫振动与共振
2.4.1 模型
在阻尼谐振子基础上增加外部驱动力 :
降阶后:
关键点:右端函数显含时间 t——这在 solve_ivp 中是完全允许的,因为函数签名本身就是 f(t, y, *args)。
def forced_oscillator(t, state, m, c, k, F0, omega):
x, v = state
return [v, (-c * v - k * x + F0 * np.cos(omega * t)) / m]
sol = solve_ivp(forced_oscillator, [0, 50], [0, 0], args=(1.0, 0.2, 4.0, 1.0, 2.0))
2.4.2 共振现象
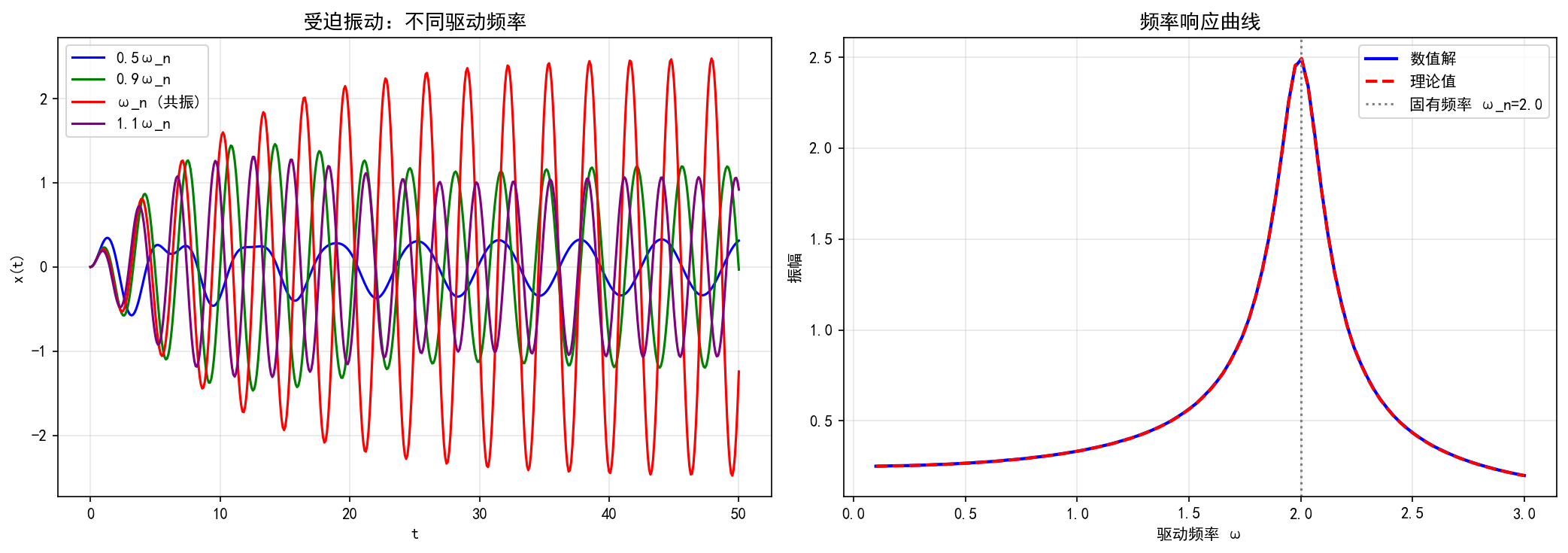
左图展示了四种驱动频率下的响应——注意初始阶段的暂态过程(前约 10 个时间单位)和之后的稳态振荡:
低频驱动(0.5ωn,蓝色):响应振幅较小,相位滞后小
接近共振(0.9ωn,绿色):振幅显著增大
共振(ωn,红色):振幅达到最大——驱动力频率与系统固有频率匹配,能量输入最大化
高频驱动(1.1ωn,紫色):振幅减小,相位反转
右图是频率响应曲线:横坐标为驱动频率 ω,纵坐标为稳态振幅。数值解(蓝色实线)与理论值(红色虚线)完美吻合:
峰值出现在 ,略小于固有频率 ——阻尼越大,共振峰越低、越宽。
建模应用:在数学建模中,共振分析常用于:
机械结构设计(避免共振频率与外部激励匹配)
电路谐振分析
地震工程中建筑物固有频率与地震波频率的关系
2.5 降阶的一般步骤总结
代码模板:
def higher_order_system(t, Y, *params):
"""
将 n 阶 ODE 转化为一阶方程组的通用模板
Y = [y_1, y_2, ..., y_n] 对应 [y, y', ..., y^{(n-1)}]
返回 [y_1', y_2', ..., y_n'] = [y_2, y_3, ..., f(t, Y, *params)]
"""
y1, y2, y3 = Y # 对三阶方程
return [
y2, # y_1' = y_2
y3, # y_2' = y_3
f(t, y1, y2, y3, *params) # y_3' = f(t, Y)
]
2.6 本节小结
solve_ivp只能求解一阶方程——高阶方程必须降阶为一阶方程组降阶公式:对 n 阶方程,令 yi=y(i−1),得到 n 个一阶方程
相图(y vs y′)是理解系统行为的直观工具:闭合曲线 = 周期解,螺旋线 = 衰减解
非线性方程(如单摆)无法解析求解时,数值方法依然可以直接处理
右端函数可以显含时间 t——受迫振动就是典型例子
共振分析在工程建模中极为重要:固有频率与驱动频率的匹配决定振幅大小
第3章 常微分方程组
3.1 方程组的基本形式
solve_ivp 的核心能力是求解一阶方程组:
其中 y=(y1,y2,…,yn) 是 n 维向量。右端函数 f 接收标量 t 和数组 y,返回同样长度的数组 dy/dt。
from scipy.integrate import solve_ivp
import numpy as np
# 最简示例:两个耦合方程
def coupled_system(t, y, a, b):
y1, y2 = y
dy1 = a * y1 - b * y1 * y2
dy2 = b * y1 * y2 - a * y2
return [dy1, dy2]
sol = solve_ivp(coupled_system, [0, 20], [1.0, 2.0], args=(1.0, 0.5))
# 解的索引:sol.y[0] 是 y1 的解,sol.y[1] 是 y2 的解
3.2 Lotka-Volterra 捕食者-猎物模型
3.2.1 模型推导
Lotka-Volterra 模型描述了捕食者-猎物两个种群的相互作用:
其中:
四项的含义:
αx:猎物在无捕食者时的指数增长
−βxy:捕食导致的猎物减少(与两个种群数量的乘积成正比)
δxy:捕食者因捕食而增长
−γy:捕食者无猎物时的自然衰减
def lotka_volterra(t, state, alpha, beta, delta, gamma):
x, y = state
dx = alpha * x - beta * x * y
dy = delta * x * y - gamma * y
return [dx, dy]
alpha, beta, delta, gamma = 1.0, 0.1, 0.1, 1.5
sol = solve_ivp(lotka_volterra, [0, 30], [10, 5],
args=(alpha, beta, delta, gamma), dense_output=True)
3.2.2 周期性振荡
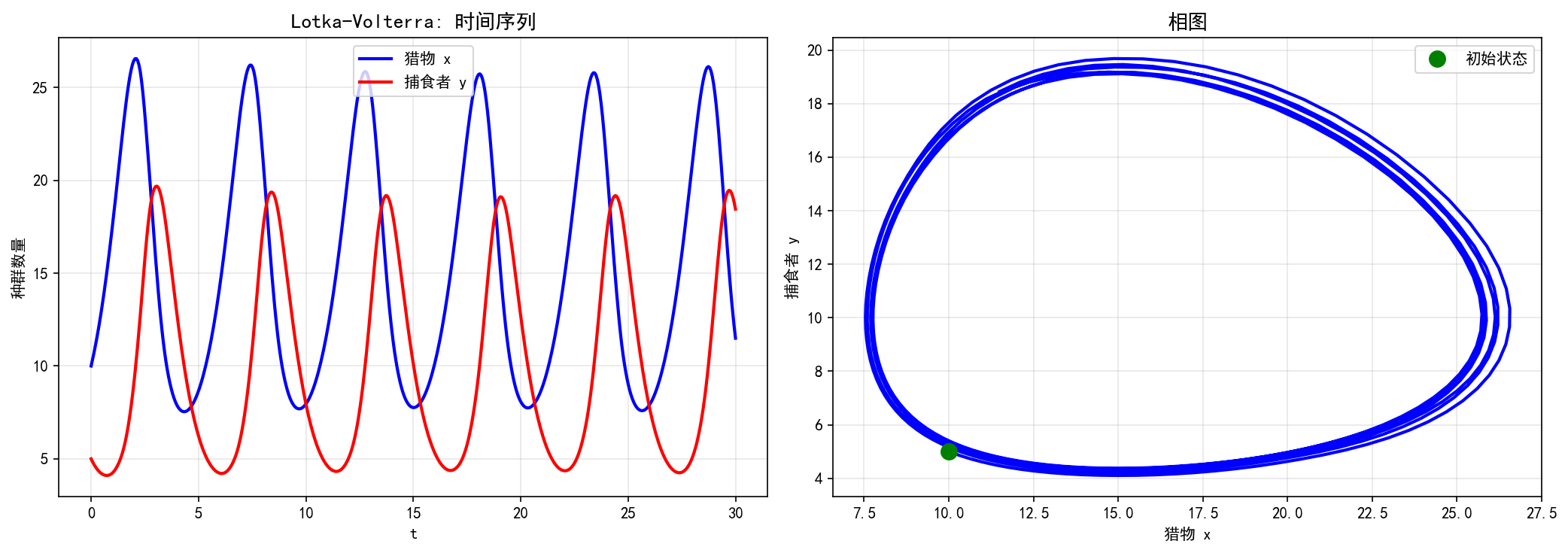
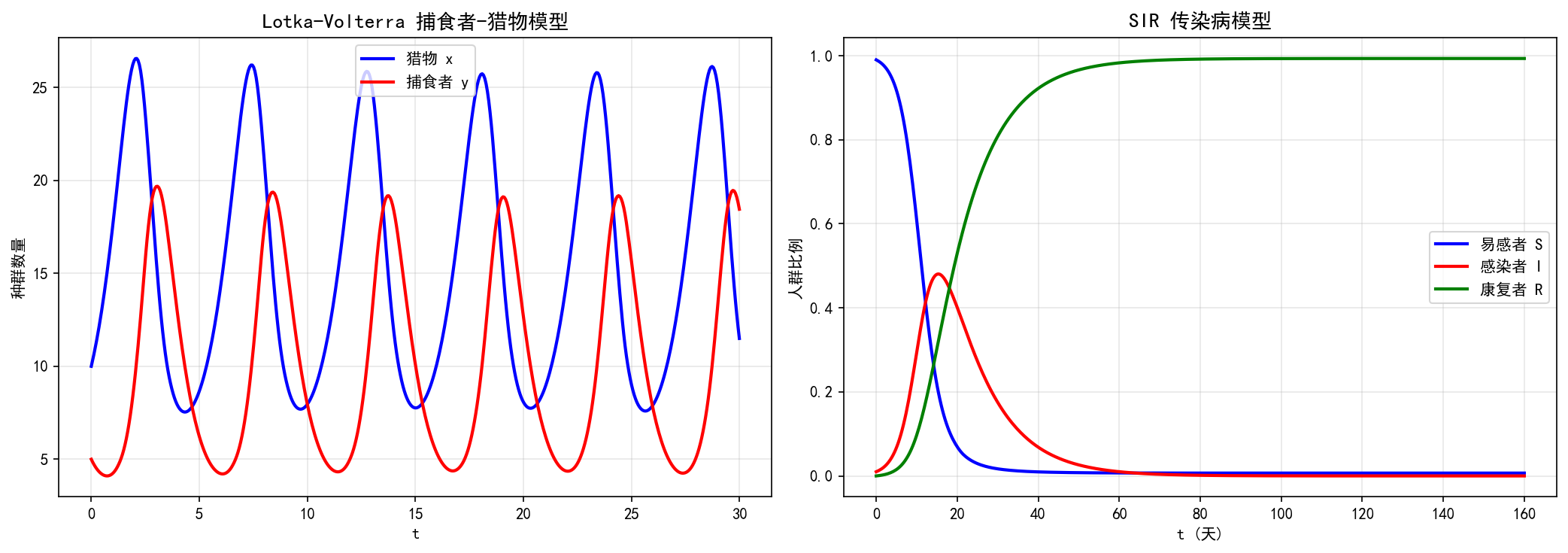
左图(时间序列)揭示了两个种群的相位差:
猎物(蓝色)先增长,捕食者(红色)滞后约 1/4 周期才达到峰值——因果链:猎物增多 → 捕食者食物充足 → 捕食者增多 → 猎物被大量捕食 → 猎物减少 → 捕食者饿死 → 猎物恢复
每个周期中,猎物的峰值约为捕食者峰值的 2 倍——捕食者需要大量猎物才能维持种群
周期约为 5-6 个时间单位
右图(相图)展示了闭合轨道——这是保守系统的标志:
系统存在守恒量(首次积分):,在每条轨道上为常数
不同初始条件会产生不同大小的闭合轨道——振幅取决于初始状态
中心点 是非零平衡点
建模技巧:在数学建模中,Lotka-Volterra 型模型可以扩展到:
三种或更多物种的食物链
加入环境承载力(logistic 增长)
加入季节性变化(参数随时间周期性变化)
加入随机扰动(SDE 模型)
3.3 SIR 传染病模型
3.3.1 模型推导
SIR 模型将人群分为三个舱室:
其中 S+I+R=1(归一化人群比例)。
关键参数:基本再生数 R0=β/γ
R0>1:每个感染者平均传染超过 1 人,疫情爆发
R0<1:疫情自行消退
R0 是衡量传染病传播能力的核心指标——新冠原始毒株 R0≈2.5−3,Delta 约 5-8
def sir_model(t, state, beta_sir, gamma_sir):
S, I, R = state
dS = -beta_sir * S * I
dI = beta_sir * S * I - gamma_sir * I
dR = gamma_sir * I
return [dS, dI, dR]
beta_sir, gamma_sir = 0.5, 0.1
sol = solve_ivp(sir_model, [0, 160], [0.99, 0.01, 0.0],
args=(beta_sir, gamma_sir))
3.3.2 SIR 模型的动态行为
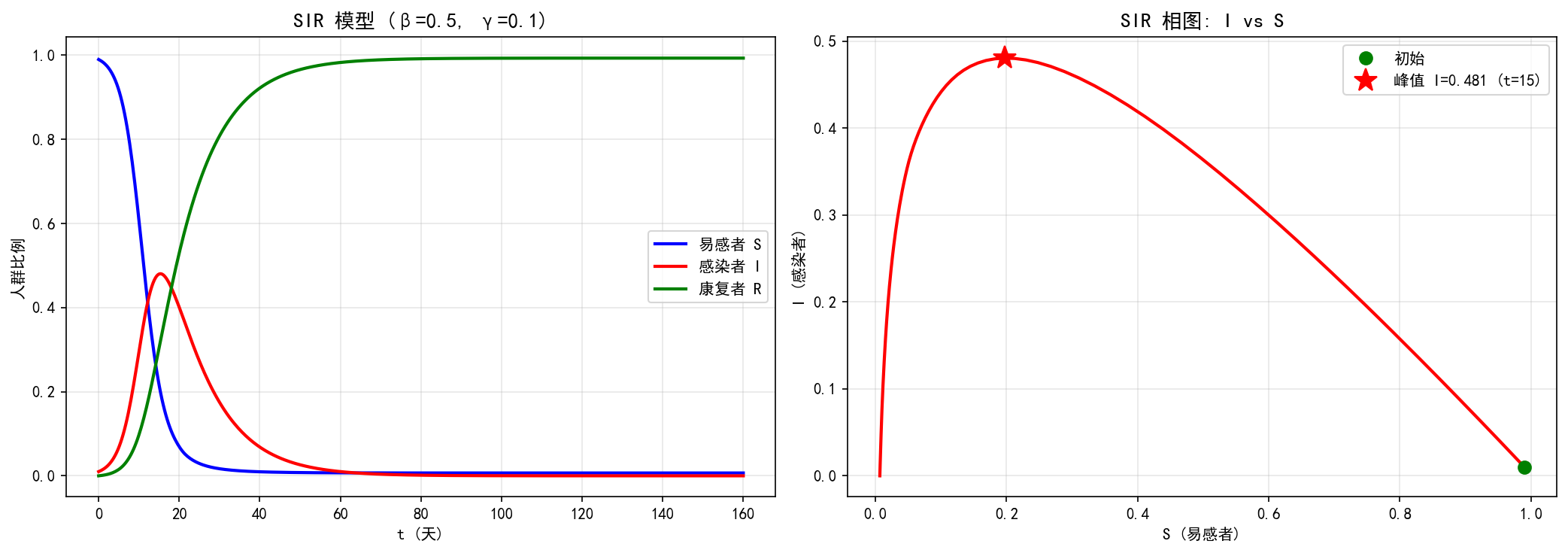
左图(时间序列)展示了典型的疫情曲线——与新冠疫情期间大家熟悉的曲线一致:
感染者 I(红色):先指数增长,约第 15 天达到峰值(约 48% 人口同时感染),然后快速下降,约第 80 天基本清零
易感者 S(蓝色):持续下降——越来越多的人被感染后移出易感群体
康复者 R(绿色):持续增长,最终接近 100%——疫情结束后几乎所有人都感染过
右图(I vs S 相图)揭示了 SIR 模型的重要特性:
轨迹从 开始,I 先上升后下降——这是因为 ,当 时 I 增长,当 时 I 减少
峰值感染点(红星)恰好出现在 处——这是 SIR 模型的精确理论结果
轨迹不闭合——SIR 不是保守系统,最终收敛到 (S∞,0)
建模应用:SIR 模型是数学建模竞赛中的高频题型,常见的扩展方向:
SEIR:加入潜伏期(Exposed 舱室)
加入疫苗接种:
加入隔离措施:将 β 设为时间的分段函数
多人群模型:不同年龄组的耦合 SIR
3.4 参数敏感性分析
3.4.1 Lotka-Volterra 的捕食率影响
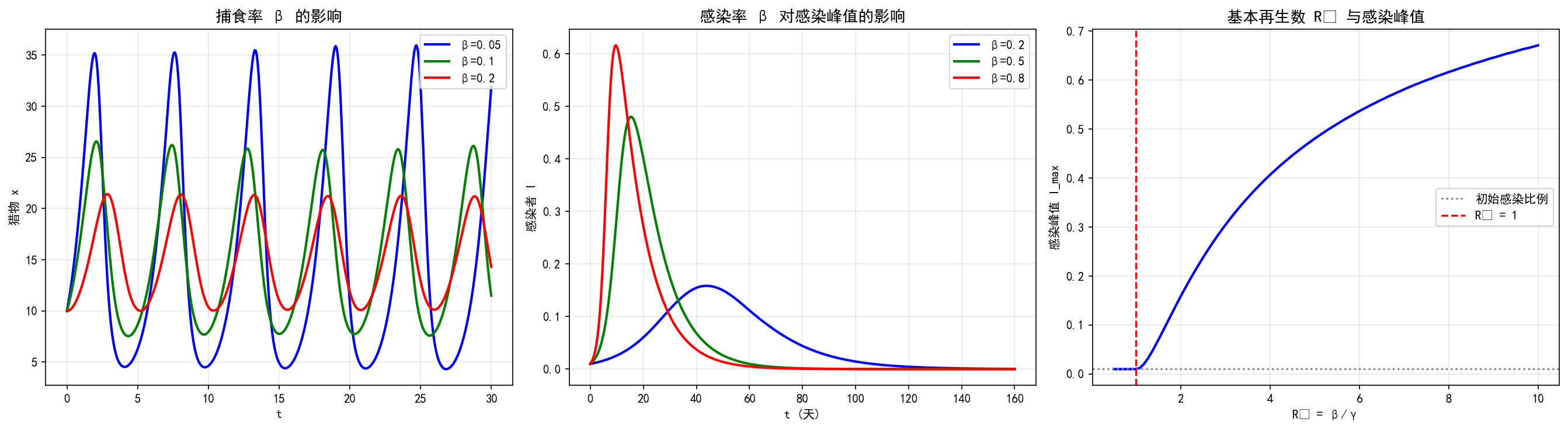
左图展示了捕食率 β 对猎物动态的影响:
β=0.05(蓝色):捕食压力小,猎物峰值更高、周期更长
β=0.1(绿色):基准情形
β=0.2(红色):捕食压力大,猎物峰值更低、周期更短——两个种群更紧密地耦合
3.4.2 感染率对疫情峰值的影响
中图展示了感染率 β 对 SIR 模型中感染者峰值的影响:
β=0.2(R0=2,蓝色):峰值约 12%,疫情发展缓慢,持续约 100 天
β=0.5(R0=5,绿色):峰值约 48%,爆发迅猛
β=0.8(R0=8,红色):峰值超过 60%,疫情在 20 天内达到高峰
建模启示:这解释了为什么减少接触(降低 β)是疫情防控的核心——即使 R0 仍然大于 1,降低 β 也能显著降低峰值感染比例,减轻医疗系统压力。这就是"压平曲线"(flatten the curve)的数学原理。
3.4.3 R₀ 与感染峰值的定量关系
右图是基本再生数 R0 与最大感染比例的定量关系:
R0≤1(红线左侧):疫情不会爆发,I 单调下降
R0=2:峰值约 12%
R0=5:峰值约 48%
R0=10:峰值超过 60%
关系呈高度非线性——R0 从 2 增加到 5,峰值从 12% 飙升到 48%。这提醒我们:微小的参数变化可能导致灾难性的后果。
3.5 建模实战:自定义方程组模板
def custom_odes(t, Y, *params):
"""
自定义 ODE 方程组的通用模板
参数:
t : float - 当前时间
Y : array - 状态向量 [y1, y2, ..., yn]
params : tuple - 模型参数
返回:
list - 各变量的导数 [dy1/dt, dy2/dt, ..., dyn/dt]
"""
y1, y2, y3 = Y # 根据变量个数调整
p1, p2, p3 = params
dy1 = ... # 根据模型方程填写
dy2 = ...
dy3 = ...
return [dy1, dy2, dy3]
# 求解
sol = solve_ivp(custom_odes, [0, 100], [y1_0, y2_0, y3_0],
args=(p1_val, p2_val, p3_val), dense_output=True)
3.6 本节小结
方程组的写法与单个方程完全相同,只是 y 变为数组,返回值为数组
Lotka-Volterra:捕食者-猎物的周期性振荡,相图呈闭合轨道
SIR:疫情从爆发到消退的完整过程,R0=β/γ 决定是否会爆发
相图是理解系统全局行为的利器:闭合 = 周期,螺旋 = 衰减,开放曲线 = 非保守系统
参数敏感性分析是数学建模的核心环节——微小的参数变化可能导致质的改变
SIR 相图中峰值感染点满足 S=1/R0——这是重要的理论结果
第4章 求解器选择与刚性方程
4.1 什么是"刚性"问题
在求解 ODE 时,solve_ivp 的默认方法是 RK45(显式 Runge-Kutta 4(5) 阶),它在大多数情况下都能很好地工作。但对于刚性问题(stiff problems),显式方法会遭遇严重困难。
刚性的直观理解
刚性系统的特征是系统中存在多个差异极大的时间尺度。快速衰减的瞬态分量强迫求解器取极小的步长以保证数值稳定,但慢速变化分量又需要积分很长时间才能看到有意义的结果。显式方法因为数值稳定性限制(CFL 条件),步长被快速分量"绑架",导致计算成本爆炸。
形象地说:显式方法像一个只靠视觉判断路况的司机——前方有一点颠簸,就猛踩刹车减速;而隐式方法像一个有预知能力的司机——它"看穿"了颠簸的本质,知道减速幅度应该多大。
数学定义
线性系统 的刚性由 Jacobian 矩阵 A 的特征值比衡量:
比值越大,问题越刚性。刚性比达到 或更高时,显式方法就难以胜任了。
4.2 Robertson 问题——经典的刚性测试
Robertson 问题是刚性 ODE 的标准测试案例,描述一个三组分化学反应:
参数 跨越了 9 个数量级——这就是刚性的根源。
from scipy.integrate import solve_ivp
import numpy as np
def robertson(t, y, k1, k2, k3):
y1, y2, y3 = y
dy1 = -k1 * y1 + k3 * y2 * y3
dy2 = k1 * y1 - k2 * y2**2 - k3 * y2 * y3
dy3 = k2 * y2**2
return [dy1, dy2, dy3]
k1, k2, k3 = 0.04, 3e7, 1e4
y0 = [1.0, 0.0, 0.0]
# 使用 BDF(隐式方法)求解刚性问题
sol = solve_ivp(robertson, [0, 1e11], y0, args=(k1, k2, k3),
method='BDF', rtol=1e-6, atol=1e-10)
求解结果
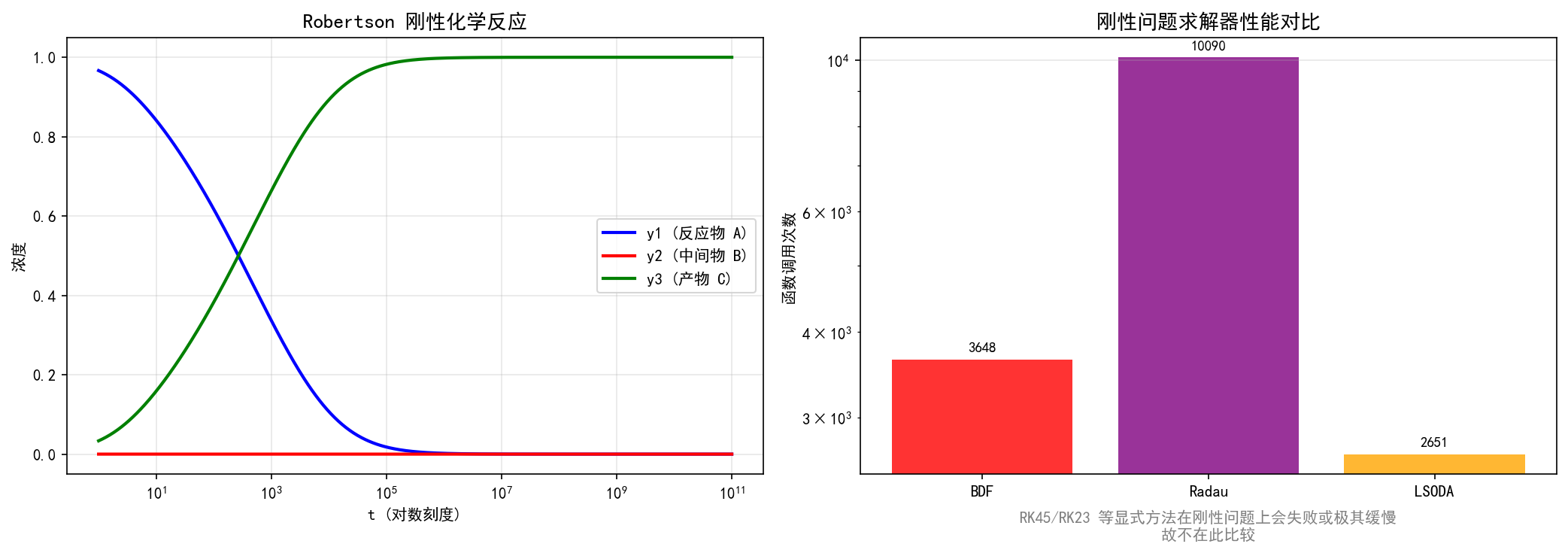
左图展示了 Robertston 反应的浓度变化(横轴为对数刻度,覆盖 t∈[1,1011]):
y₁(蓝色):反应物 A,从 1.0 单调衰减,约在 t=105 时接近零
y₂(红色):中间物 B,浓度始终极低(约 10−4量级)——它生成极快也消耗极快,是典型的刚性瞬态分量
y₃(绿色):产物 C,逐渐累积至接近 1.0
右图对比了三种适用于刚性问题的求解器:
RK45 和 RK23 呢? 它们在 Robertson 问题上会尝试取步长约 10−10 才能维持稳定——在 [0,1011] 的积分区间内需要约 1021 步,实际上永远无法完成。这就是刚性的威力。
4.3 非刚性问题:所有方法都能胜任
对于非刚性问题,各方法都能给出准确解,但效率差异明显。以简谐振子 为例:
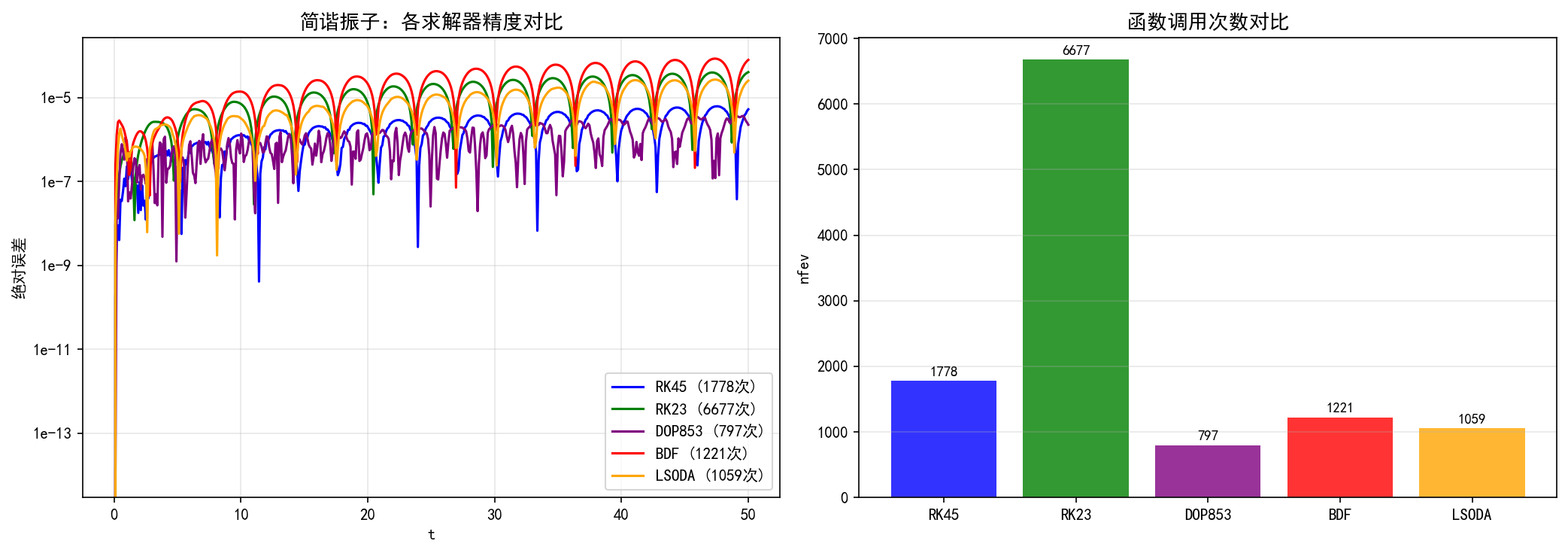
左图(误差对比):
DOP853(紫色)精度最高——8 阶方法在相同容差下产生的截断误差最小
RK45(蓝色)精度适中,是精度与效率的最佳平衡
BDF(红色)和 LSODA(橙色)作为隐式方法也能工作,但在非刚性问题上并不比显式方法更优
RK23(绿色)误差最大——2/3 阶方法精度不足
右图(函数调用次数):
DOP853 仅需 797 次——高阶方法步长可以更大
RK45 需要 1778 次——中等开销
RK23 高达 6677 次——低阶导致步长过小,反而最慢
结论:对于非刚性问题,优先使用 RK45(默认)或 DOP853(高精度需求)。不要用 RK23——它并不快。
4.4 Van der Pol 振荡器:从非刚性到刚性的过渡
Van der Pol 方程是一个经典的非线性振荡器:
降阶后:
参数 μ 控制非线性强度,也决定了问题的刚性程度。
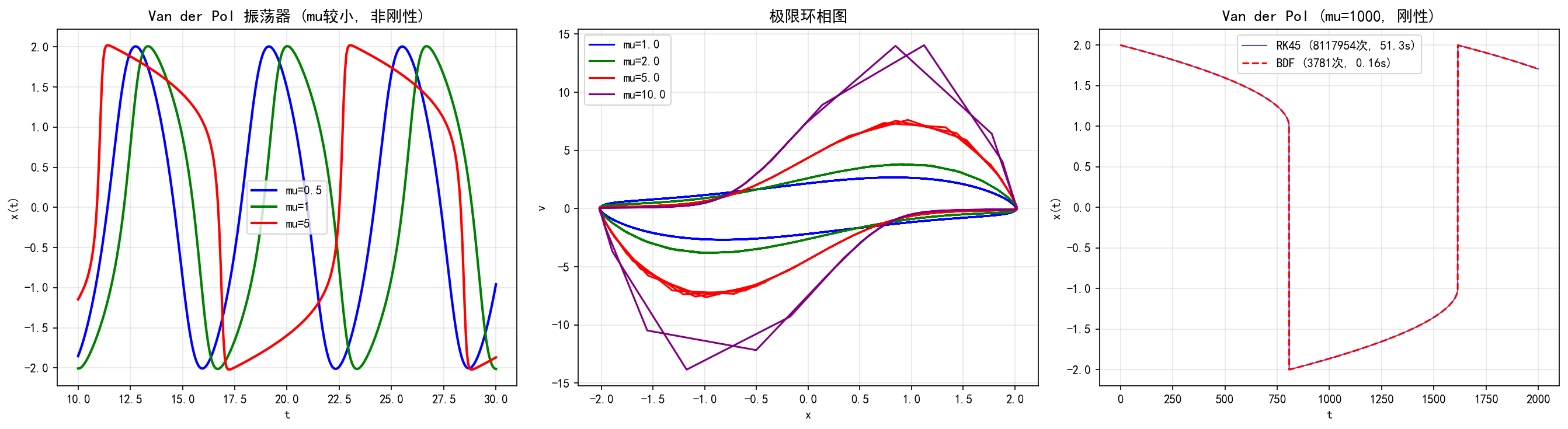
μ 较小时:非刚性
左图展示了 μ=0.5,1,5 时的时间响应。当 μ 较小时,系统表现为平滑的准正弦振荡——这是非刚性的,RK45 可以高效求解。
极限环
中图展示了不同 μ 值下的相图(极限环):
μ 越小,极限环越接近圆形(接近线性谐振子)
μ 越大,极限环越趋向矩形——系统在慢变和快变两种模式间切换,这就是刚性的来源
μ 很大时:刚性显现
右图对比了 μ=1000 时 RK45 与 BDF 的表现:
当 μ 很大时,Van der Pol 振荡器的解在"快速跳跃"和"缓慢漂移"之间交替(右图中几乎垂直的跳变部分)。显式方法必须在快速阶段取极小步长,即使缓慢阶段可以用大步长也做不到——因为步长一旦放大就不稳定。
这就是刚性的典型表现。此时切换到 BDF、Radau 或 LSODA 是必须的。
4.5 求解器选择速查表
切换方法很简单
# 默认方法(非刚性)
sol = solve_ivp(fun, [0, 10], y0) # 默认 method='RK45'
# 发现警告或速度极慢 → 改用刚性求解器
sol = solve_ivp(fun, [0, 10], y0, method='BDF')
# 不确定 → 让系统自动判断
sol = solve_ivp(fun, [0, 10], y0, method='LSODA')
如何识别刚性问题
以下信号提示你遇到了刚性问题:
求解极慢——函数调用次数异常多
警告信息——"Required step size is less than spacing between numbers"
解出现非物理振荡——数值不稳定导致的伪振荡
模型包含快慢两个时间尺度——如化学反应中快反应和慢反应共存
4.6 实用技巧
from scipy.integrate import solve_ivp
# 技巧1:限制最大步长(防止错过快速瞬态)
sol = solve_ivp(fun, [0, 100], y0, max_step=0.1)
# 技巧2:收紧容差提高精度
sol = solve_ivp(fun, [0, 100], y0, rtol=1e-8, atol=1e-10)
# 技巧3:检查求解状态
if not sol.success:
print(f"求解失败: {sol.message}")
# 技巧4:监控函数调用次数(性能指标)
print(f"函数调用: {sol.nfev} 次")
print(f"成功: {sol.success}, 状态码: {sol.status}")
4.7 本节小结
刚性源于系统中存在差异极大的时间尺度,显式方法被迫取极小步长
RK45/RK23/DOP853是显式方法,适用于非刚性问题BDF/Radau是隐式方法,适用于刚性问题LSODA能自动切换显式/隐式模式,是不确定时的安全选择Van der Pol 方程展示了从非刚性到刚性的连续过渡:μ 越大越刚性
Robertson 问题是经典刚性测试:三个速率常数跨越 9 个数量级
遇到求解极慢或警告时,第一反应应该是换用 BDF 或 LSODA
第5章 事件检测与密集输出
5.1 事件检测(Events)
solve_ivp 最强大的功能之一是事件检测——可以在积分过程中自动检测特定条件(如变量穿过零点),并精确地定位事件发生的时间点。
事件函数的基本用法
事件函数是一个签名为 event(t, y, *args) → float 的函数。当返回值为 0 时表示事件发生:
from scipy.integrate import solve_ivp
import numpy as np
def my_event(t, y):
return y[0] - 1.0 # 当 y[0] = 1 时触发
sol = solve_ivp(fun, [0, 100], y0, events=my_event)
每个事件函数有两个可选属性:
my_event.terminal = True # 事件发生时终止积分(默认 False)
my_event.direction = -1 # 检测方向:-1=仅下降穿过, 1=仅上升穿过, 0=双向(默认)
示例1:弹跳球
一个经典的物理事件场景:球从高处落下,每次触地反弹,恢复系数为 0.8。
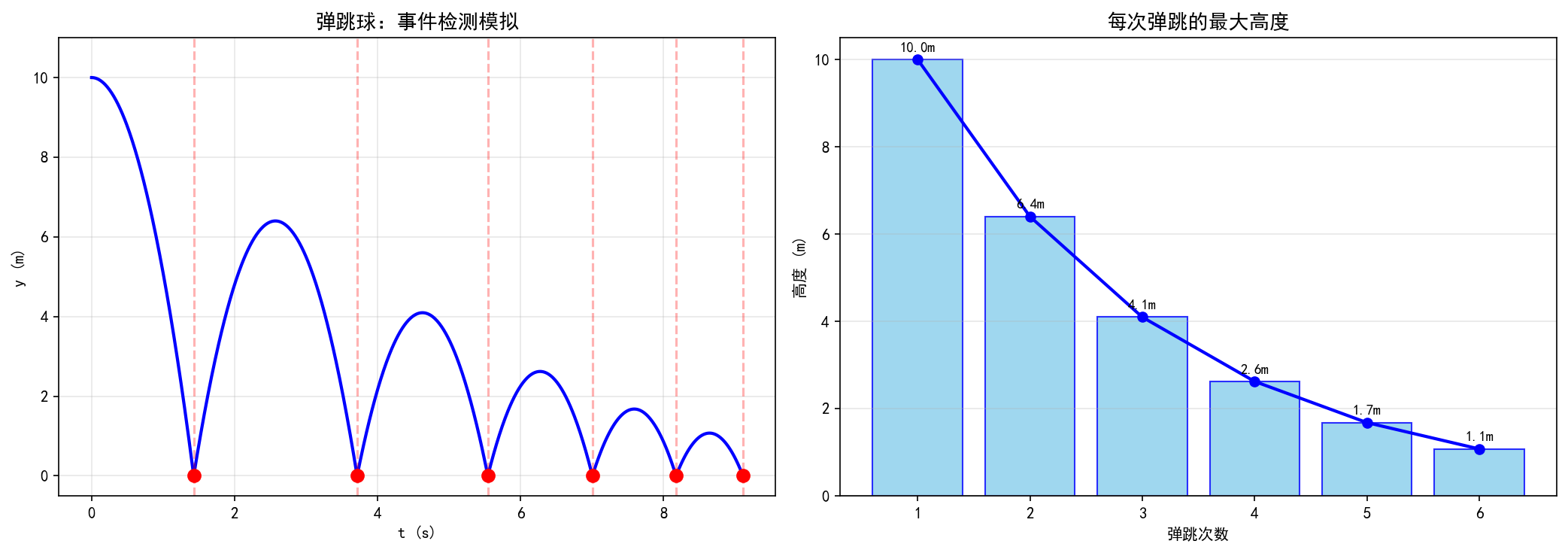
左图展示了弹跳球的高度-时间曲线。每次触地(y = 0)时,事件函数被触发:
红色虚线标记事件触发时刻——
solve_ivp精确地定位了每次撞击的时间,而不是简单地在某个时间步"发现"y 已变为负值红色圆点是每次弹跳的撞击点——事件检测精度远高于求解器的步长精度
通过设置
terminal = True,积分在每次撞击时暂停,我们修改速度(乘以恢复系数)后重新启动积分
右图展示了每次弹跳的最大高度——按照物理规律,每次反弹后高度为前一次的 倍(恢复系数 0.8 的平方)。
def ground_event(t, state, g, restitution):
"""事件函数:球触地"""
y, v = state
return y # y = 0 时触发
ground_event.terminal = True # 触地时停止积分
ground_event.direction = -1 # 只检测 y 下降穿过 0(排除反弹瞬间)
# 每次触地后,链式调用 solve_ivp
for bounce in range(6):
sol = solve_ivp(bouncing_ball, [t_start, t_start + 50], y_current,
args=(g, restitution), events=ground_event)
if sol.t_events[0].size > 0:
t_bounce = sol.t_events[0][0]
v_after = -restitution * v_before # 反弹
y_current = [0.0, v_after]
t_start = t_bounce
示例2:抛体运动的射程计算
事件检测的另一个经典应用是自动停止积分——不需要预先知道精确的积分区间。
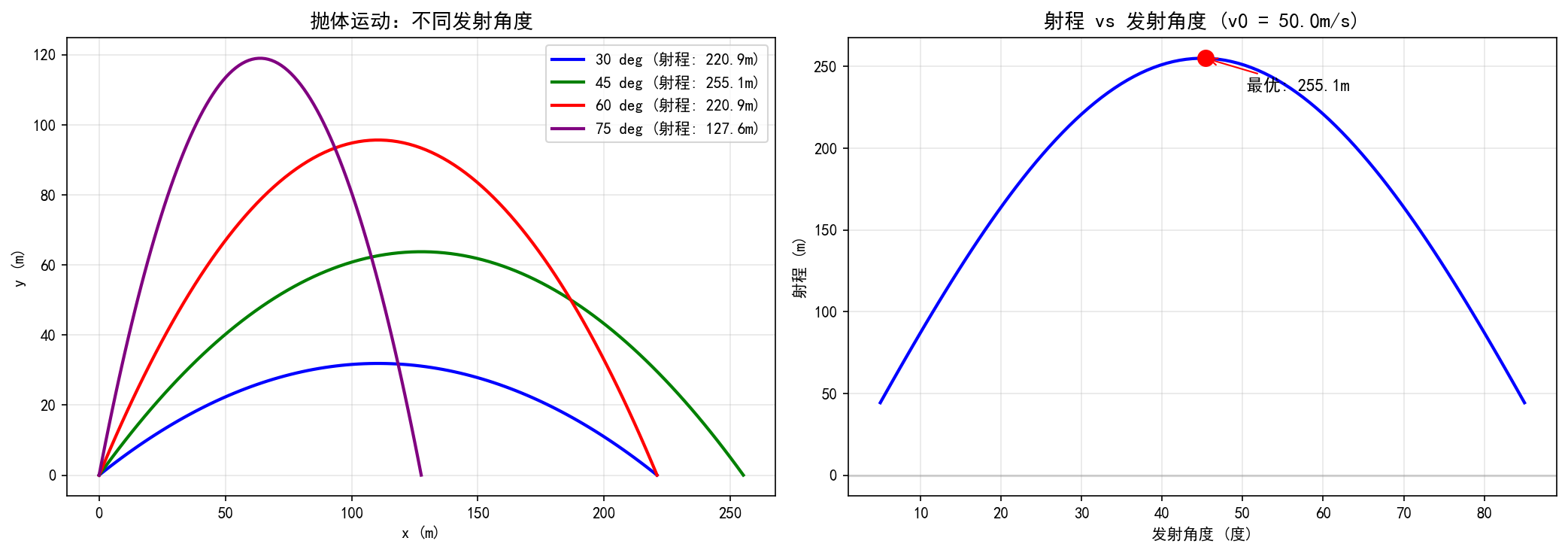
左图展示了以不同角度发射的抛体轨迹。每个轨迹都设置了地面事件(y = 0),积分在精确的落地时刻自动停止——不需要猜测积分时间。图例中直接显示了用事件检测精确计算的射程。
右图通过遍历所有角度,绘制了射程-角度曲线。红色圆点标记了最优发射角度:
最优角度 ≈ 45°,与理论结果 米完全吻合
30° 和 60° 的射程相同——这是抛体运动的经典对称性(互补角射程相等)
def ground_hit(t, state, g):
return state[1] # y = 0 时触发
ground_hit.terminal = True
ground_hit.direction = -1 # 只检测落地(y 从正变零)
# 求解器在精确的落地时刻停止
sol = solve_ivp(projectile, [0, 20], y0, args=(g,), events=ground_hit)
# 精确的射程
range_val = sol.t_events[0][0] * v0 * np.cos(theta)
5.2 密集输出(Dense Output)
solve_ivp 返回的 sol.t 是求解器自适应选择的时间点——这些点可能不均匀,且数量不一定满足你的需求。dense_output=True 提供了一个连续的插值函数,可以在任意时间点查询解。
密集输出的工作原理
求解器在每个内部步长上构建一个插值多项式,使得:
在步的端点处精确匹配解值
插值多项式的阶数与求解方法匹配
sol = solve_ivp(fun, [0, 40], y0, dense_output=True)
# 在任意时间点查询(甚至不是求解器的内部步长点)
t_query = np.linspace(0, 40, 2000)
y_at_query = sol.sol(t_query) # 连续插值,返回形状 (n_eq, len(t_query))
示例:Lorenz 混沌系统
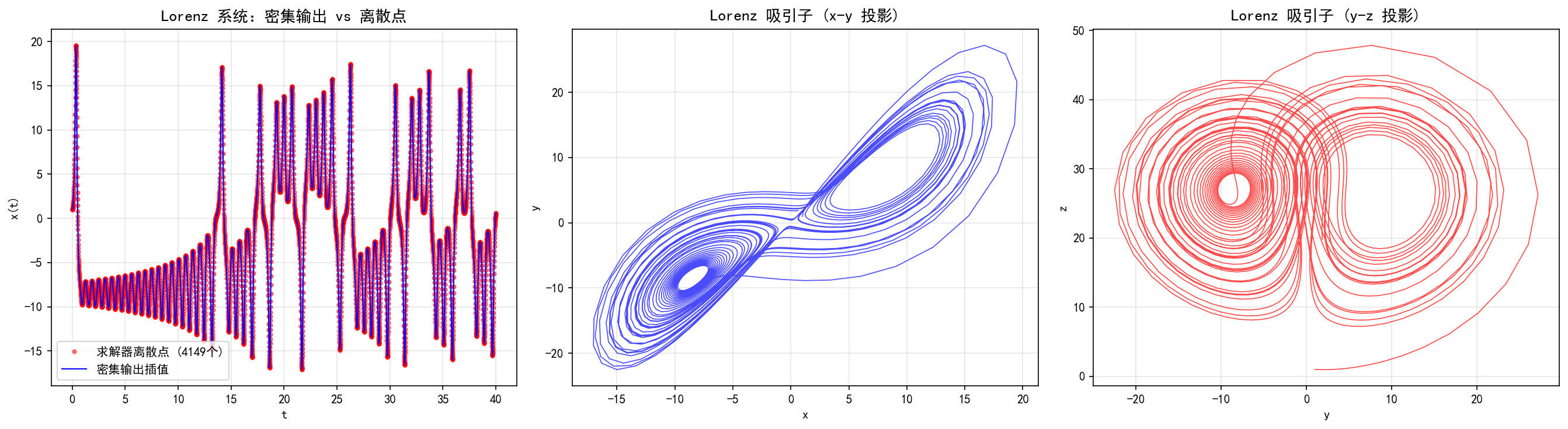
左图对比了求解器的离散输出点(红色圆点)和密集输出插值(蓝色曲线):
Lorenz 系统是经典的混沌系统,变化剧烈且不规则
求解器只用了约 600 个离散点就覆盖了 [0, 40] 的积分区间
通过
dense_output=True,我们可以在任意时间点(这里是 2000 个均匀点)获得平滑的插值结果插值精度由求解器的容差保证——对于
rtol=1e-8的设置,插值误差也在相同量级
中图和右图展示了 Lorenz 吸引子的两个投影——混沌系统的标志性"蝴蝶"形状。密集输出确保了相图曲线的平滑性。
def lorenz(t, state, sigma, rho, beta):
x, y, z = state
return [sigma*(y-x), x*(rho-z)-y, x*y-beta*z]
# 高精度求解
sol = solve_ivp(lorenz, [0, 40], [1,1,1],
args=(10, 28, 8.0/3.0),
rtol=1e-8, atol=1e-10, dense_output=True)
# 密集输出用于平滑的相图
t_dense = np.linspace(0, 40, 2000)
x, y, z = sol.sol(t_dense)
# 相图投影
plt.plot(x, y, 'b-', lw=0.8) # x-y 投影
plt.plot(y, z, 'r-', lw=0.8) # y-z 投影
5.3 多事件检测
solve_ivp 可以同时监测多个事件函数:
def event1(t, y):
return y[0] - 1.0 # 当 y[0] = 1 时触发
def event2(t, y):
return y[1] - 0.5 # 当 y[1] = 0.5 时触发
# 将多个事件函数放在列表中
sol = solve_ivp(fun, [0, 100], y0, events=[event1, event2])
# 每个事件的结果分别存储在 t_events 列表中
print(f"事件1触发时间: {sol.t_events[0]}")
print(f"事件2触发时间: {sol.t_events[1]}")
方向控制的实际应用
direction 属性在物理场景中非常有用:
# 弹簧振子:检测每次经过平衡位置
def zero_crossing(t, y):
return y[0] # x = 0
zero_crossing.direction = 1 # 只检测从左向右穿过
# 弹跳球:只检测落地(y 从正变零),不检测反弹
def ground(t, y):
return y[0] # y = 0
ground.direction = -1 # 只检测下降穿过
ground.terminal = True # 触地即停
5.4 实战技巧
技巧1:链式事件求解
对于需要反复处理同一事件的情况(如多次碰撞、周期性触发),链式调用 solve_ivp:
t_start = 0.0
y_current = y0
results = []
while t_start < t_final:
sol = solve_ivp(fun, [t_start, t_final], y_current,
events=my_event, dense_output=True)
results.append(sol)
if sol.t_events[0].size == 0:
break # 没有更多事件了
t_start = sol.t_events[0][0]
y_current = handle_event(sol.y[:, -1]) # 自定义事件处理
技巧2:事件函数的精度
事件检测的精度独立于求解器的步长——solve_ivp 会用二分法精确找到事件发生的时刻,精度通常远优于 rtol 和 atol 设置的容差。
sol = solve_ivp(fun, [0, 100], y0, events=my_event, rtol=1e-3)
# 事件检测精度通常比 rtol 高几个数量级
# 即使 rtol=1e-3,事件触发时间的精度可能达到 1e-8 或更高
技巧3:密集输出的使用场景
5.5 本节小结
事件函数返回零时触发事件,通过
terminal和direction控制行为terminal=True在事件发生时停止积分——适用于碰撞、越界等场景direction=-1/1/0控制检测穿越方向——避免重复触发多个事件函数可以同时监测,结果分别存储在
sol.t_events列表中密集输出(
dense_output=True)提供连续插值函数sol.sol(t)事件检测精度通常远高于求解器步长精度——二分法定位
Lorenz 混沌系统的相图是密集输出的经典应用——确保曲线平滑
链式调用
solve_ivp可以处理反复发生的事件序列
第6章 偏微分方程简介
6.1 从 ODE 到 PDE:方法线(Method of Lines)
scipy.integrate 没有内置的 PDE 求解器,但有限差分法配合 solve_ivp 可以高效求解许多常见的偏微分方程。
核心思想——方法线(Method of Lines):
将空间域离散化为网格点
用有限差分近似空间导数
得到一组耦合的 ODE(每个网格点一个方程)
用
solve_ivp求解这个 ODE 系统
import numpy as np
from scipy.integrate import solve_ivp
# 空间离散
N = 50
L = 1.0
dx = L / (N - 1)
x = np.linspace(0, L, N)
# 将 PDE 转化为 ODE 系统
def pde_to_ode(t, u, alpha, dx):
dudt = np.zeros_like(u)
# 内部点用中心差分近似 d²u/dx²
dudt[1:-1] = alpha * (u[2:] - 2*u[1:-1] + u[:-2]) / dx**2
# 边界条件
dudt[0] = 0
dudt[-1] = 0
return dudt
# 用 solve_ivp 求解
sol = solve_ivp(pde_to_ode, [0, T_final], u0, args=(alpha, dx))
这种方法的优势是复用 solve_ivp 的全部功能——自适应步长、刚性求解器、事件检测——全部直接可用。
6.2 热传导方程
一维热传导方程是最经典的抛物型 PDE:
其中 α 是热扩散系数,u(x,t) 是温度分布。
数值离散
用二阶中心差分近似空间二阶导数:
得到 ODE 系统:
def heat_eq_ode(t, u, alpha, dx):
dudt = np.zeros_like(u)
dudt[1:-1] = alpha * (u[2:] - 2*u[1:-1] + u[:-2]) / dx**2
# 边界条件:u(0,t) = u(L,t) = 0
dudt[0] = 0
dudt[-1] = 0
return dudt
N = 50
x = np.linspace(0, 1.0, N)
dx = 1.0 / (N - 1)
alpha = 0.01
# 初始条件:高斯脉冲
u0 = np.exp(-((x - 0.5) / 0.1)**2)
sol = solve_ivp(heat_eq_ode, [0, 0.5], u0, args=(alpha, dx),
rtol=1e-6, atol=1e-8, dense_output=True)
数值结果
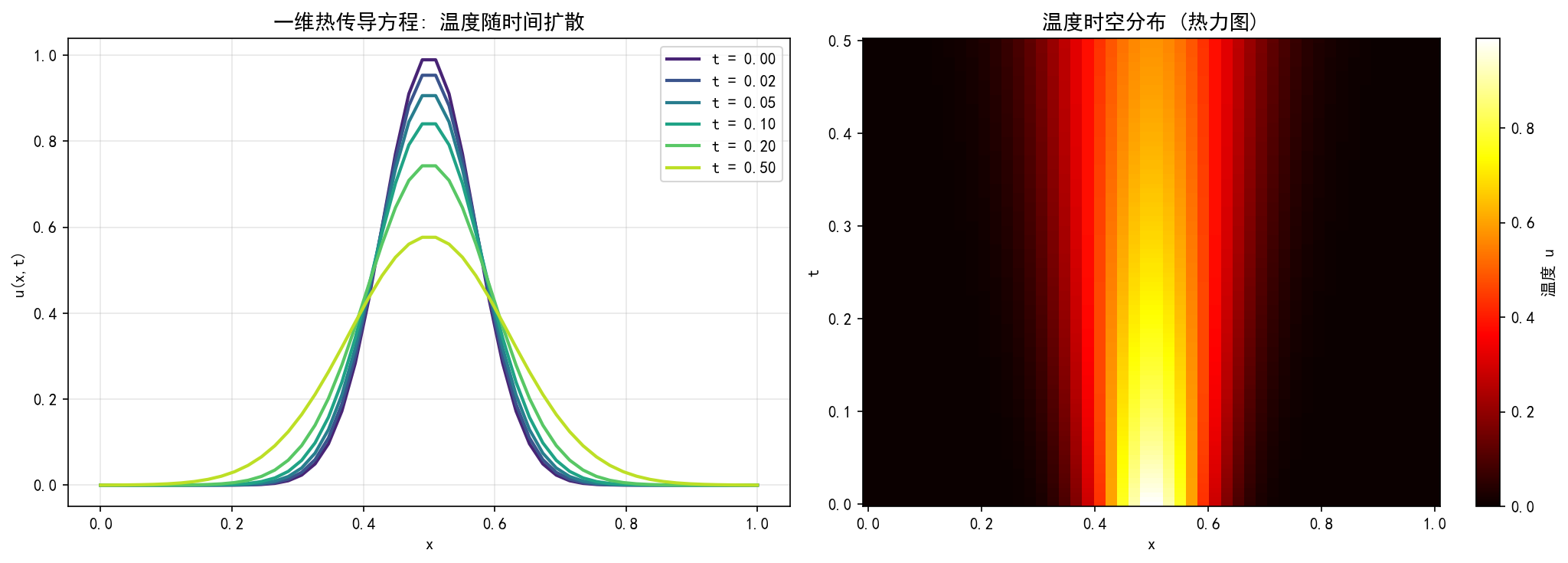
左图展示了高斯初始温度分布随时间的扩散过程:
t = 0(深紫色):初始高斯脉冲,中心在 x = 0.5,宽度 σ = 0.1
t = 0.02 ~ 0.20:脉冲逐渐变宽、变低——热量从高温区向低温区扩散
t = 0.50(浅黄绿色):脉冲已显著展宽,峰值降低约一半——但曲线下的面积(总热量)保持不变
右图是时空热力图,更直观地展示了扩散过程:
横轴是空间坐标 x,纵轴是时间 t
颜色越亮温度越高——初始的高亮区域随时间向两侧扩展
扩散前沿呈抛物线型扩展——符合热传导方程的标度律 x∼αt
建模应用:热传导方程的离散形式可以类比到:
污染物在水体中的扩散
种群的空间扩散
金融中的 Black-Scholes 方程(经变量变换后等价于热传导方程)
6.3 波动方程
一维波动方程是经典的双曲型 PDE:
其中 c 是波速。这是二阶时间导数方程,需要先降阶为一阶系统:
令 ,则:
离散后得到 2N 个 ODE——这是高阶方程降阶技巧(第2章)和空间离散的结合。
def wave_eq_ode(t, state, c, dx):
N = len(state) // 2
u = state[:N] # 位移
v = state[N:] # 速度
dudt = v.copy()
dvdt = np.zeros(N)
dvdt[1:-1] = c**2 * (u[2:] - 2*u[1:-1] + u[:-2]) / dx**2
dvdt[0] = 0 # 边界
dvdt[-1] = 0
return np.concatenate([dudt, dvdt])
# 初始条件:高斯脉冲,零初速度
u0 = np.exp(-((x - 0.3) / 0.05)**2)
v0 = np.zeros(N)
state0 = np.concatenate([u0, v0])
sol = solve_ivp(wave_eq_ode, [0, 2.0], state0, args=(1.0, dx))
波动现象
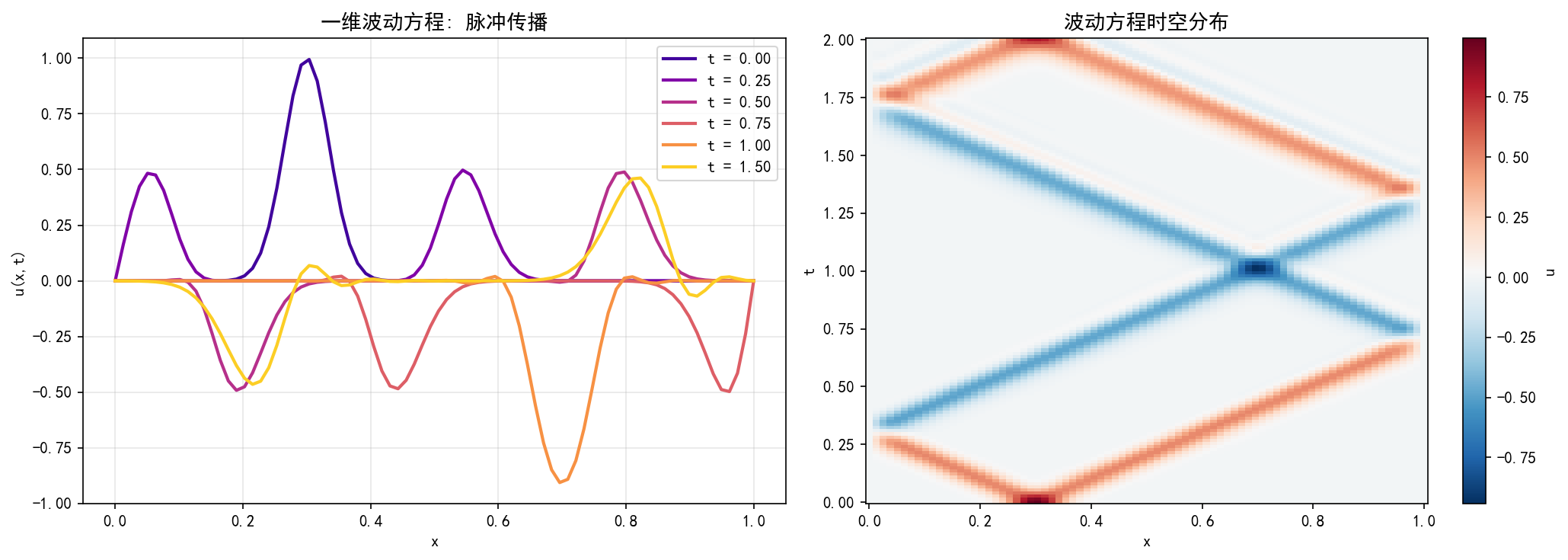
左图展示了脉冲在固定端点条件下的传播:
t = 0(深紫色):初始脉冲位于 x = 0.3 处
t = 0.25(紫色):脉冲分裂为两个子脉冲,分别向左和向右传播——这是波动方程的特征解结构
t = 0.50(粉紫色):左行波到达左端点并反射,反射后波形反转(固定端点的反射)
t = 0.75(粉色):右行波到达右端点并反射
t = 1.0(橙色):两个反射波在中心相遇并叠加——产生干涉
右图的时空热力图清晰地展示了波的传播轨迹:
两条交叉的对角线——脉冲以恒定速度 c 向两侧传播
到达边界后折返——斜率不变但符号反转(反射)
中心交叉点——两列波相遇叠加
与热传导的对比:
热传导是耗散性的——脉冲不断展宽、振幅衰减
波动是保守性的——脉冲形状基本保持(有色散),能量守恒
6.4 Fisher-KPP 方程——反应扩散
Fisher-KPP 方程结合了扩散和非线性反应:
这是最简单的反应-扩散方程,描述了一个物种在空间中扩散并 logistic 增长的过程。
def fisher_kpp(t, u, D, r):
dudt = np.zeros_like(u)
# 扩散项 + 反应项
dudt[1:-1] = D * (u[2:] - 2*u[1:-1] + u[:-2]) / dx**2 + r * u[1:-1] * (1 - u[1:-1])
dudt[0] = 0
dudt[-1] = 0
return dudt
D, r = 0.001, 1.0
u0 = np.zeros(N)
u0[N//2] = 1.0 # 点源
sol = solve_ivp(fisher_kpp, [0, 5.0], u0, args=(D, r), dense_output=True)
行波解
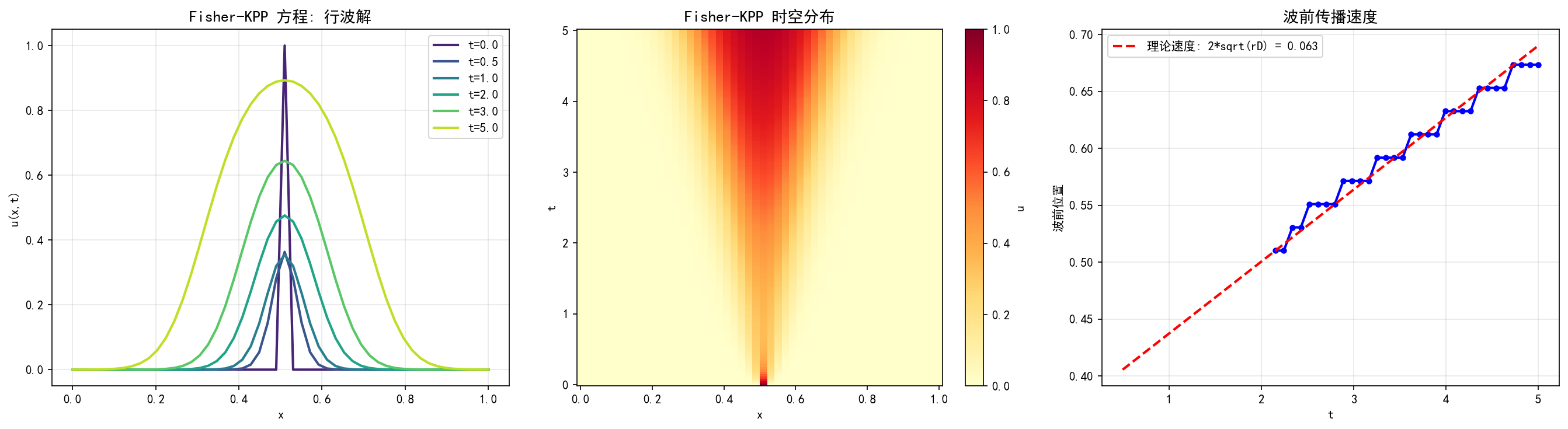
左图展示了点源初始条件下的演化——形成了向右传播的行波前(traveling wave front):
t = 0(深紫色):只在 x = 0.5 处有值 1,其余为零
t = 0.5 ~ 2.0:波形向右扩展,形成一个陡峭的前沿
t = 3.0 ~ 5.0:前沿持续向右传播,波形形状趋于稳定——这就是行波解
中图(热力图)更直观地展示了行波前:红色区域从左向右推进,形成一条斜线。
右图定量分析了波前传播速度:
蓝色曲线:数值计算得到的波前位置(u = 0.5 的位置)随时间的变化
红色虚线:理论波速
数值结果与理论预测高度吻合——波前以恒定速度传播
建模应用:Fisher-KPP 方程可以描述:
入侵物种的空间扩散
化学反应前沿的传播
神经脉冲沿轴突的传播
肿瘤生长前沿
6.5 方法线的通用模板
import numpy as np
from scipy.integrate import solve_ivp
def solve_pde_1d(rhs_spatial, u0, t_span, x=None, N=50, L=1.0,
bc_left=None, bc_right=None, **kwargs):
"""
一维 PDE 求解通用模板(方法线)
参数:
rhs_spatial : callable - 空间离散后的右端函数
签名 f(t, u) -> du/dt
u0 : array - 初始条件
t_span : tuple - 时间区间
x : array - 空间网格(可选)
N : int - 网格点数
L : float - 空间域长度
**kwargs : 传递给 solve_ivp 的额外参数
返回:
sol : Bunch - solve_ivp 的返回值
"""
if x is None:
x = np.linspace(0, L, N)
sol = solve_ivp(rhs_spatial, t_span, u0, **kwargs)
return sol, x
# 使用示例
N = 50
x = np.linspace(0, 1, N)
dx = x[1] - x[0]
def my_pde(t, u):
dudt = np.zeros_like(u)
dudt[1:-1] = ... # 填入空间离散公式
dudt[0] = ... # 左边界
dudt[-1] = ... # 右边界
return dudt
sol, x = solve_pde_1d(my_pde, u0, [0, 10], x=x)
6.6 注意事项与局限性
稳定性限制
显式时间积分方法(RK45)对空间离散有CFL 稳定性条件:
如果网格太细,RK45 的自适应步长可能变得非常小。此时应改用隐式方法:
# 细网格时改用 BDF
sol = solve_ivp(heat_eq_ode, [0, T], u0, args=(alpha, dx),
method='BDF', rtol=1e-6, atol=1e-8)
二维及更高维度
方法线可以推广到二维:
# 2D 热传导: u_t = alpha * (u_xx + u_yy)
u = U.reshape(Nx, Ny) # 将一维状态向量重塑为二维
laplacian = (np.roll(u, 1, axis=0) + np.roll(u, -1, axis=0) +
np.roll(u, 1, axis=1) + np.roll(u, -1, axis=1) - 4*u) / dx**2
dudt = alpha * laplacian.flatten()
但当维度增加时,ODE 系统的规模变为 N2 或 N3,计算量急剧增加——此时应考虑专门的 PDE 求解器(如 FEniCS、FiPy)。
刚性问题
PDE 离散后的 ODE 系统通常是刚性的——空间离散引入了快慢两种时间尺度。推荐始终使用 BDF 或 LSODA:
# 推荐做法
sol = solve_ivp(pde_ode, [0, T], u0, method='BDF',
rtol=1e-6, atol=1e-8)
6.7 本节小结
PDE 可以通过方法线(Method of Lines)转化为 ODE 系统,用
solve_ivp求解热传导方程:抛物型 PDE,扩散过程,脉冲展宽
波动方程:双曲型 PDE,需降阶为两个一阶方程,脉冲传播
Fisher-KPP:反应-扩散方程,产生行波解,波速
PDE 离散后的 ODE 系统通常是刚性的——优先使用 BDF 或 LSODA
空间网格越细,CFL 条件越严格——必要时减小
max_step方法线适用于一维和简单的二维问题——复杂 PDE 需要专门的求解器
附录:完整代码获取
本教程所有代码均可通过以下链接下载: