第1章 引言——什么是振动
1.1 振动的定义
振动(Vibration/Oscillation)是指物理量在某一平衡位置(或平均值)附近做往复性变化的运动形式。
振动的关键特征:
注意:振动不一定指"物体的机械运动"。广义地说,任何物理量(如电压、电流、电场强度、粒子数密度等)只要在某个参考值附近周期性或非周期性地往复变化,都可称为振动。
1.2 振动的普遍性
振动现象遍及物理学的各个分支,以下是几类典型的振动系统:
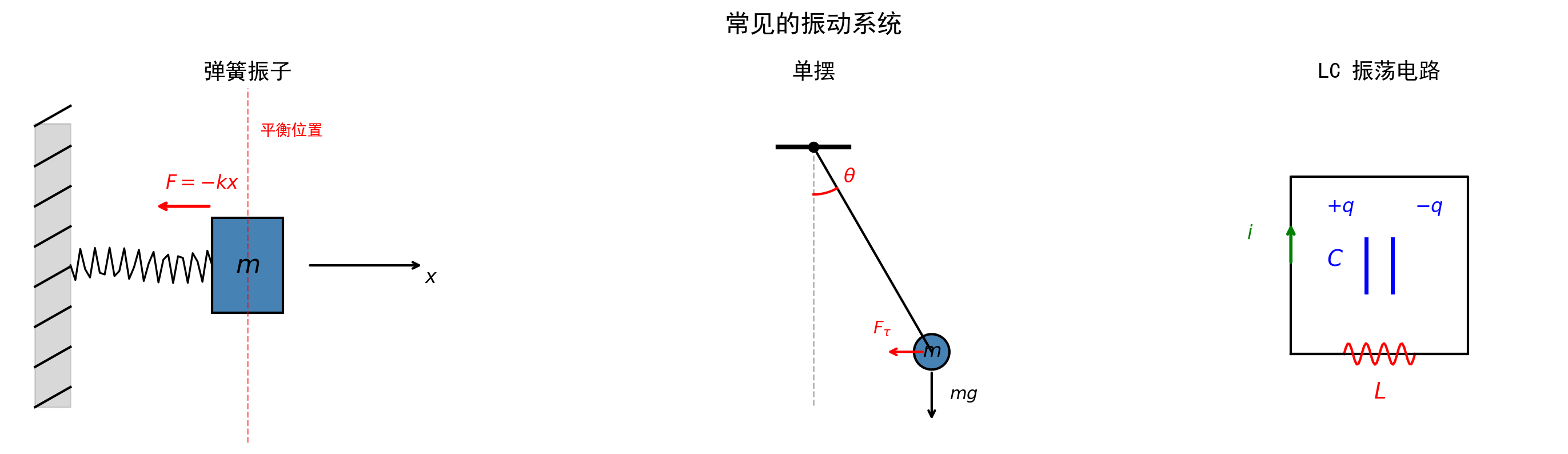
图1-1 三种典型的振动系统:(a) 弹簧振子——物块在弹性力作用下沿直线往复运动;(b) 单摆——质点在重力切向分力作用下往复摆动;(c) LC振荡电路——电荷和电流在电容与电感之间往复转换。
机械振动
电磁振荡
其他领域的振动
量子力学:谐振子是量子力学中最基本的可解模型之一
固体物理:晶格振动(声子)是理解固体热性质的基础
天体物理:变星的脉动、双星系统的轨道振动等
1.3 为什么从简谐运动开始
尽管振动现象千差万别,但本课程聚焦于简谐运动(Simple Harmonic Motion, SHM),原因如下:
(1) 简谐运动是最基本的振动形式
简谐运动满足线性回复力条件:
即回复力与位移成正比、方向相反。这是最简单、最"纯粹"的振动形式。
(2) 小振动近似 → 简谐运动
大多数实际振动系统在平衡位置附近的小幅度振动都可以近似为简谐运动。例如:
这说明:简谐运动是非线性振动在平衡位置附近的线性近似,是理解更复杂振动的起点。
(3) 傅里叶分析的基础
任意周期振动(即使不是简谐的)都可以通过傅里叶级数分解为一系列简谐运动的叠加:
f(t)=a0+n=1∑∞[ancos(nωt)+bnsin(nωt)] 因此,掌握了简谐运动,就掌握了分析任意复杂周期振动的"基本单元"。
(4) 不同物理领域的共性
机械振动、电磁振荡、量子谐振子……虽然物理图像不同,但它们的运动方程形式相同:
dt2d2ξ+ω2ξ=0 这种数学上的统一性使得我们可以用同一套方法处理不同领域的问题。
1.4 本教程内容概览
本教程按照以下逻辑展开:
模块 | 内容 | 核心思想 |
|---|
基础 | 简谐运动的定义、描述参量(振幅、周期、频率、相位)、运动学方程 | 建立简谐运动的数学框架 |
实例 | 弹簧振子、单摆、物理摆 | 将抽象方程应用到具体物理系统 |
能量 | 简谐运动中动能与势能的相互转换 | 从能量角度理解振动 |
合成 | 多个简谐运动的叠加——拍、李萨如图形 | 利用叠加原理分析复杂振动 |
推广 | 阻尼振动、受迫振动、共振 | 引入耗散和外界驱动 |
电磁 | LC振荡电路 | 展示机械振动与电磁振荡的类比 |
拓展 | 非线性振动简介 | 了解超出线性近似的丰富现象 |
学习建议:
掌握微分方程的求解——简谐运动的核心是二阶线性微分方程 x¨+ω2x=0,务必熟悉其通解形式
理解相位的物理意义——相位是简谐运动最抽象但最重要的概念,它决定了振动的"起始状态"和不同振动之间的"步调关系"
多做图示分析——旋转矢量图、x-t 曲线、相图等可视化工具能帮助你直观理解抽象的数学关系
第2章 简谐运动基础
2.1 简谐运动的定义
2.1.1 动力学定义
简谐运动(Simple Harmonic Motion, SHM)是指物体在线性回复力作用下,在平衡位置附近所做的往复运动。
线性回复力的特点是:
F=−kx(2-1) 其中:
x 是物体相对于平衡位置的位移
k>0 是比例系数(对弹簧振子来说就是劲度系数)
负号表示回复力始终指向平衡位置,与位移方向相反
2.1.2 运动学定义
从运动学角度看,简谐运动是物体的位移随时间按余弦(或正弦)函数规律变化的运动:
x(t)=Acos(ωt+φ)(2-2) 其中:
2.1.3 两种定义的等价性
下面证明上述两种定义是等价的。
从动力学到运动学:对质量为 m 的物体应用牛顿第二定律
mx¨=F=−kx 即
x¨+mkx=0 令 ω2=mk,得到简谐运动的标准微分方程:
x¨+ω2x=0(2-3) 这是一个二阶常系数齐次线性微分方程。验证 x=Acos(ωt+φ) 是否为其解:
x˙x¨=−Aωsin(ωt+φ)=−Aω2cos(ωt+φ)=−ω2x 代入式 (2-3) 得 −ω2x+ω2x=0,成立。因此 x=Acos(ωt+φ) 是方程的通解。
从运动学到动力学:若位移按余弦规律变化 x=Acos(ωt+φ),则
a=x¨=−Aω2cos(ωt+φ)=−ω2x 即加速度与位移成正比、方向相反,这正是线性回复力作用的结果(F=ma=−mω2x,令 k=mω2 即得 F=−kx)。
关键结论:简谐运动的三种等价描述
受力特征:F=−kx(回复力与位移成正比反向)
微分方程:x¨+ω2x=0(其中 ω2=k/m)
运动方程:x(t)=Acos(ωt+φ)
2.2 简谐运动的运动学方程
由位移表达式 x(t)=Acos(ωt+φ),可依次求出速度和加速度。
位移
x(t)=Acos(ωt+φ)(2-4) 速度
v(t)=x˙=−Aωsin(ωt+φ)=Aωcos(ωt+φ+2π)(2-5) 加速度
a(t)=x¨=−Aω2cos(ωt+φ)=Aω2cos(ωt+φ+π)(2-6) 三者的关系
从上面的表达式可以看出位移、速度、加速度之间的重要关系:
物理量 | 表达式 | 振幅 | 相位 |
|---|
位移 x | Acos(ωt+φ) | A | ωt+φ |
速度 v | Aωcos(ωt+φ+2π) | Aω | ωt+φ+2π |
加速度 a | Aω2cos(ωt+φ+π) | Aω2 | ωt+φ+π |
相位关系:
物理含义:
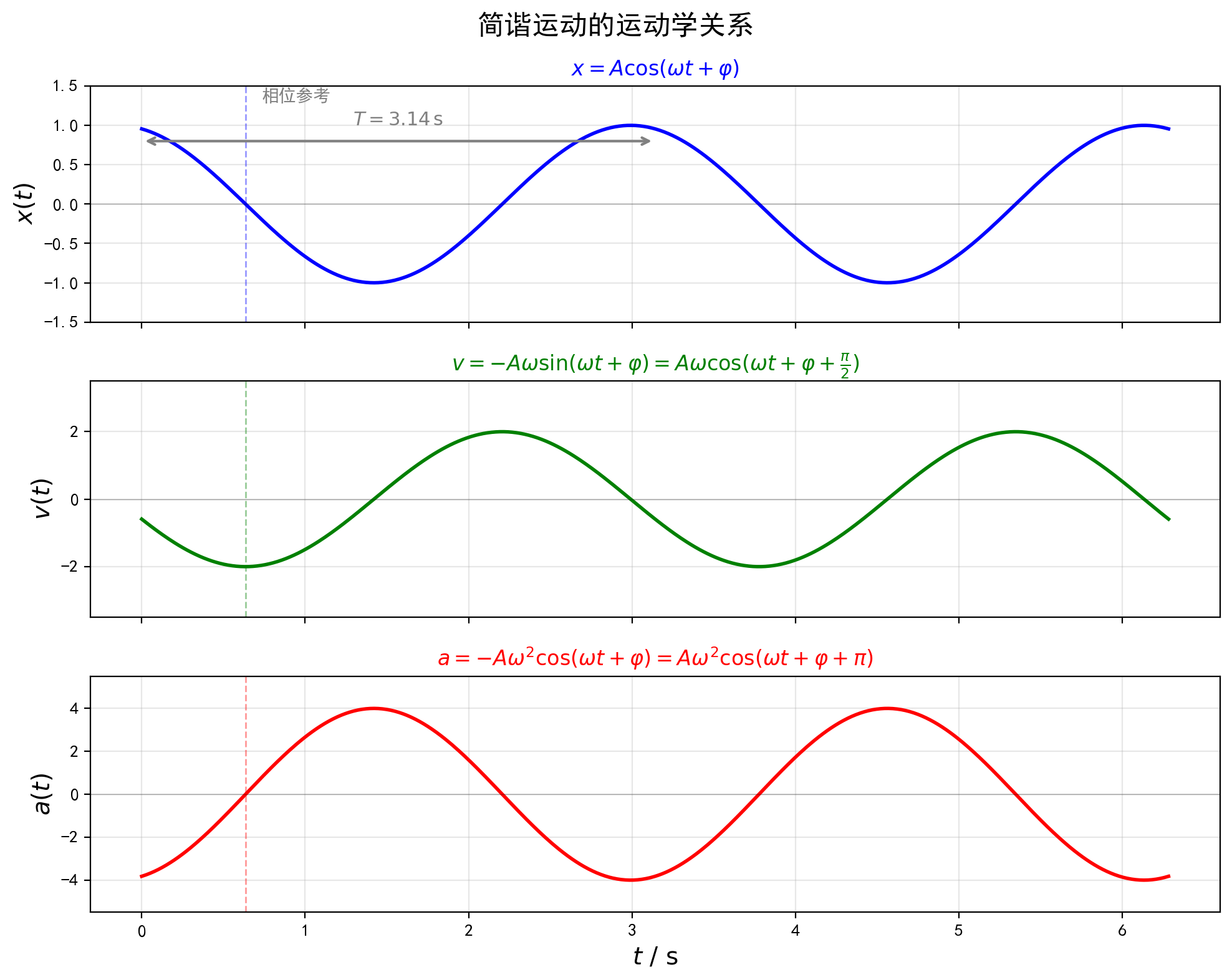
图2-1 简谐运动的位移、速度、加速度随时间的变化曲线(参数:A=1.0, ω=2.0rad/s, φ=0.3)。蓝色虚线标记了位移过零点的位置,可以看出:位移为零时速度达极值,加速度与位移反相。周期 T=2π/ω≈3.14s。
2.3 简谐运动微分方程的通解
方程 x¨+ω2x=0 的通解有多种等价写法。
写法一:余弦形式(最常用)
x(t)=Acos(ωt+φ)(2-7) 其中 A>0,φ∈[0,2π)。这是物理中最常用的形式。
写法二:正弦形式
x(t)=Asin(ωt+φ′)(2-8) 与余弦形式的关系:φ′=φ−π/2。
写法三:线性组合形式
x(t)=C1cos(ωt)+C2sin(ωt)(2-9) 其中 C1 和 C2 是两个独立的积分常数。这种形式在利用初始条件求解时特别方便(见第4章)。
写法四:复数形式
x(t)=Re[A~eiωt](2-10) 其中 A~=Aeiφ 是复振幅,包含了振幅和相位的全部信息。复数形式在交流电路和波动理论中非常有用。
四种写法的等价性
它们之间的关系:
Acos(ωt+φ)=Acosφcos(ωt)−Asinφsin(ωt)=C1cos(ωt)+C2sin(ωt) 其中:
C1=Acosφ,C2=−Asinφ 反过来:
A=C12+C22,φ=arctan(−C1C2) 提示:无论采用哪种写法,通解中都包含两个独立的常数(A 和 φ,或 C1 和 C2),这与二阶微分方程需要两个初始条件(x0 和 v0)来完全确定运动是一致的。
2.4 简谐运动的判定条件
判断一个运动是否为简谐运动,有以下方法:
方法一:受力分析
若物体受到的回复力满足 F=−kx(k 为正的常数),则该运动为简谐运动。
方法二:微分方程
若运动满足 x¨+ω2x=0(ω 为常数),则为简谐运动。
方法三:运动方程
若位移可以写成 x=Acos(ωt+φ) 的形式(A,ω,φ 均为常数),则为简谐运动。
方法四:能量特征
若势能函数在平衡位置附近为二次函数 Ep=21kx2,则小振动为简谐运动。
本章小结:
简谐运动由线性回复力 F=−kx 驱动,满足微分方程 x¨+ω2x=0
运动方程为 x(t)=Acos(ωt+φ),速度 v(t)=−Aωsin(ωt+φ),加速度 a(t)=−Aω2cos(ωt+φ)
速度相位超前位移 π/2,加速度与位移反相(相位差 π)
通解有多种等价形式,核心是包含两个独立常数
第3章 振幅、周期、频率、相位
本章详细讨论描述简谐运动的四个基本物理量。它们共同完整地刻画了一个简谐运动的状态。
3.1 振幅 A
振幅(Amplitude)是物体离开平衡位置的最大位移的绝对值:
A=∣x∣max 在运动方程 x(t)=Acos(ωt+φ)中,由于 cos 的取值范围是 [−1,1],因此位移的取值范围是 [−A,A],振幅 A 就是这个范围的一半。
振幅的物理意义
振幅与初始条件的关系
振幅不是独立参数,它由初始条件(x0,v0)和系统本身(ω)共同决定:
A=x02+(ωv0)2(3-1) 推导见第4章。
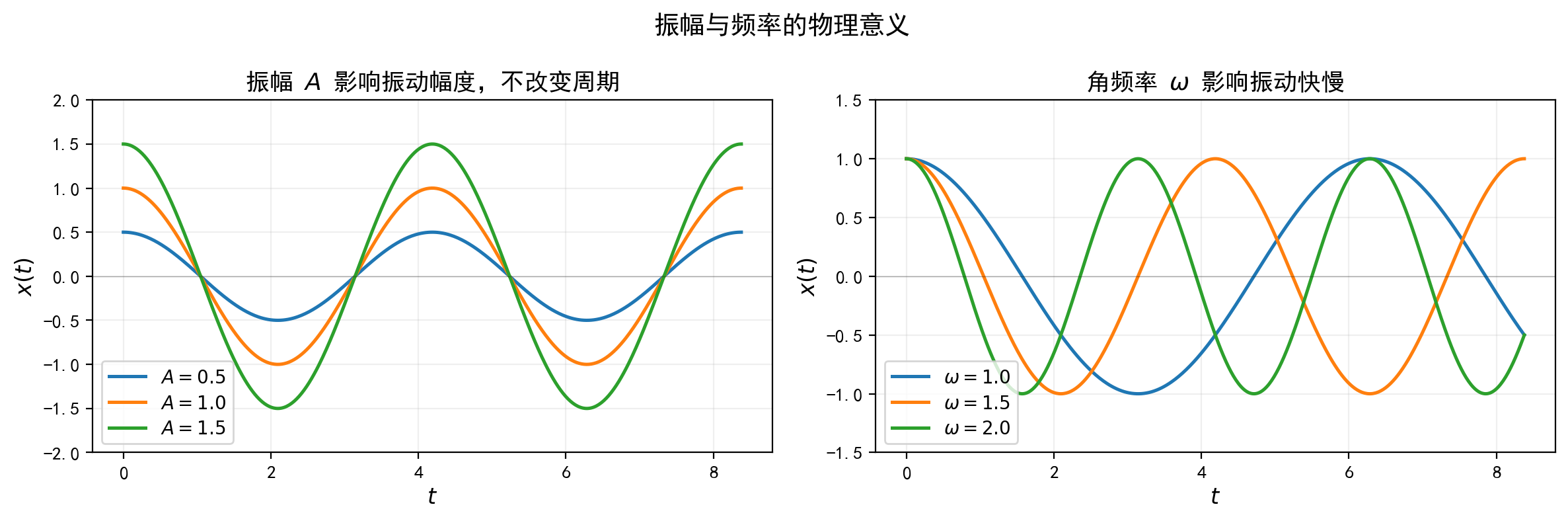
图3-1 左图:不同振幅的简谐运动曲线。振幅 A 只改变振动的"幅度",不改变周期(三条曲线周期相同)。右图:不同角频率的简谐运动曲线。ω 越大,振动越快,周期越短(T=2π/ω)。
3.2 周期 T 与频率 ν
周期
周期(Period)是完成一次全振动所需的时间:
T=ω2π(3-2) "一次全振动"指的是物体从某一状态出发,经过一系列变化后,位移和速度同时回到初始值所经历的时间。
频率
频率(Frequency)是单位时间内完成的全振动次数:
ν=T1=2πω(3-3) 频率的单位是 赫兹(Hz),1Hz=1s−1。
角频率
角频率(Angular Frequency)ω 与频率的关系:
ω=2πν=T2π(3-4) 角频率的单位是 rad/s。它在数学运算中比 ν 更方便(不需要频繁出现 2π 因子),因此微分方程中习惯使用 ω。
三者的关系总结
量 | 符号 | 单位 | 定义 | 关系 |
|---|
角频率 | ω | rad/s | 单位时间的相位变化 | ω=2πν=T2π |
频率 | ν(或 f) | Hz | 单位时间的振动次数 | ν=2πω=T1 |
周期 | T | s | 一次全振动的时间 | T=ω2π=ν1 |
重要提示:对于弹簧振子,ω=k/m,因此
T=2πkm,ν=2π1mk 周期和频率由系统本身的性质(m 和 k)决定,与振幅无关。这是简谐运动的重要特征,称为等时性。
3.3 相位 (ωt+φ) 与初相位 φ
相位
相位(Phase)是简谐运动方程中余弦函数的整个角度参数:
Φ(t)=ωt+φ(3-5) 相位的物理意义:相位决定了简谐运动在任意时刻 t 的运动状态(即此时的位移和速度)。
初相位
初相位(Initial Phase / Phase Constant)是 t=0 时刻的相位值:
φ=Φ(0)(3-6) 初相位由初始条件决定,反映了 t=0 时振动物体的运动状态。
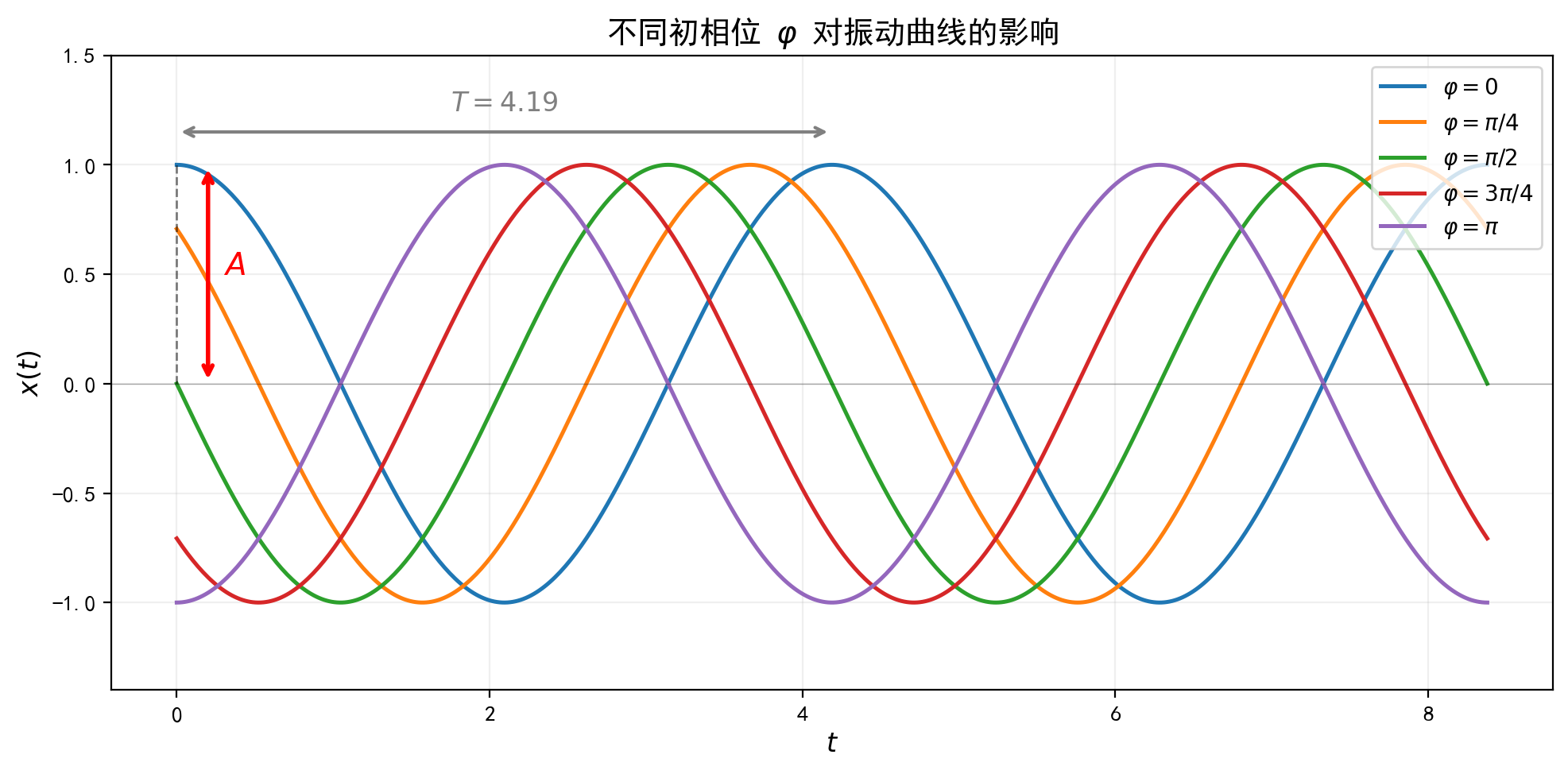
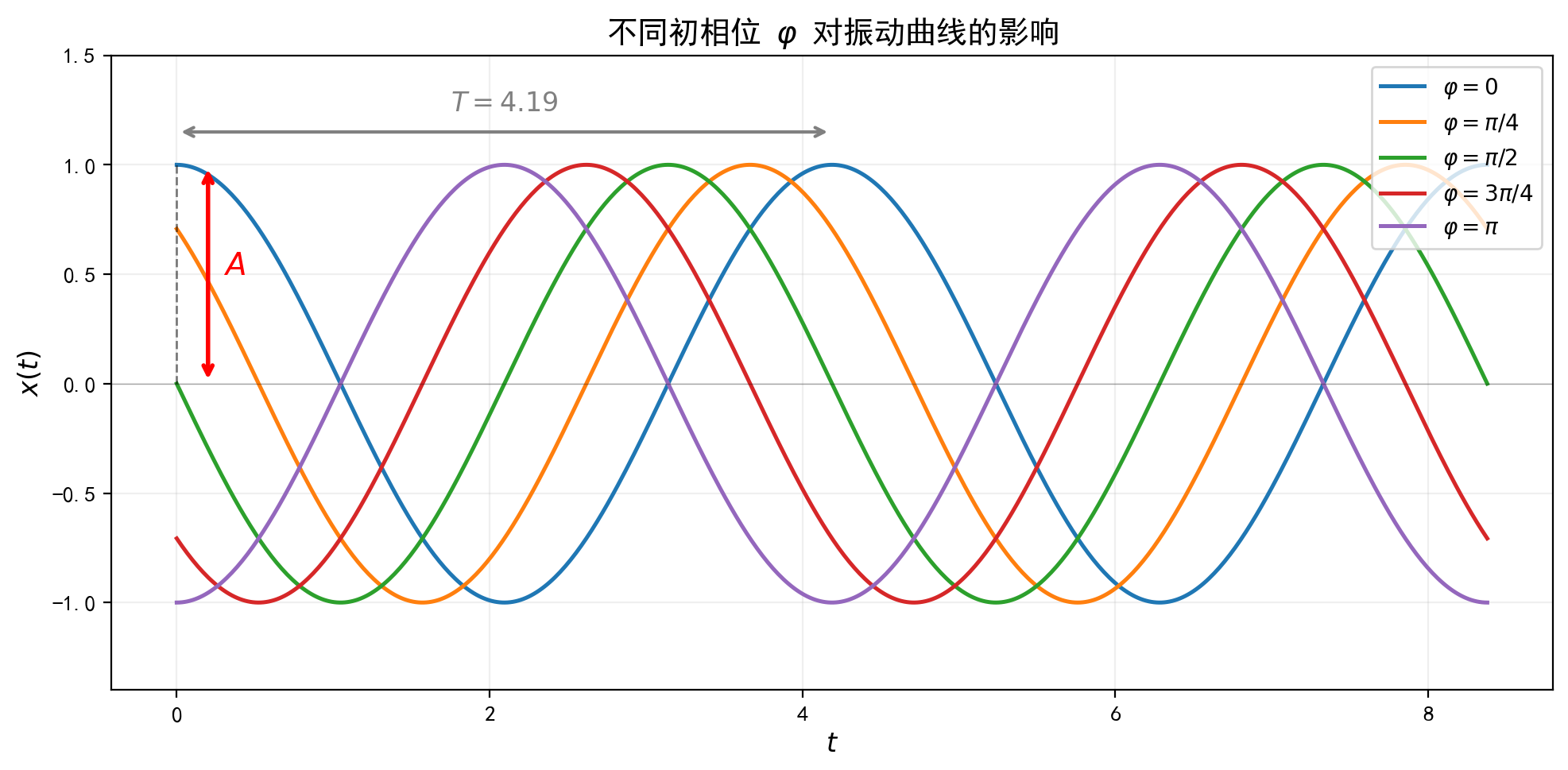
图3-2 相同振幅和角频率下,不同初相位 φ 对应的振动曲线。可以看到,不同的 φ 相当于将振动曲线沿时间轴平移。φ 越大,曲线越向左移动(即振动"提前"开始)。
初相位的几种特殊情况
初始条件 | 初相位 φ | 运动方程 |
|---|
t=0 时,x=A,v=0 | 0 | x=Acos(ωt) |
t=0 时,x=0,v>0 | −π/2 或 3π/2 | x=Asin(ωt) |
t=0 时,x=−A,v=0 | π | x=−Acos(ωt) |
t=0 时,x=0,v<0 | π/2 | x=−Asin(ωt) |
关键理解:相位 ωt+φ 才是真正"决定状态"的量。初相位 φ 只是 t=0 时的相位值。不同初相位的两个振动,在任意时刻的相位差保持恒定:
ΔΦ=(ωt+φ2)−(ωt+φ1)=φ2−φ1 这个恒定的相位差是理解"振动合成"(第9-11章)的核心。
3.4 四个物理量的层次关系
系统性质初始条件⟶⟶ω=k/mx0,v0⟶⟶T,νA,φ
本章小结:
第4章 初始条件与常数求解
简谐运动的通解 x(t)=Acos(ωt+φ) 中包含两个待定常数 A 和 φ。要完全确定一个具体的简谐运动,需要利用初始条件——即 t=0 时刻的位移 x0 和速度 v0。
4.1 由初始条件求解 A 和 φ
基本方程
在 t=0 时刻:
x0=Acosφ(4-1) v0=−Aωsinφ(4-2) 这是关于 A 和 φ 的方程组。
求振幅 A
将 (4-1) 和 (4-2) 分别平方后相加:
x02+(ωv0)2=A2cos2φ+A2sin2φ=A2 因此:
A=x02+(ωv0)2(4-3) 求初相位 φ
由 (4-1) 和 (4-2) 的比值:
tanφ=−ωx0v0(4-4) 重要提醒:由 tanφ 只能确定 φ 的终边,不能唯一确定 φ(因为 tan 的周期是 π)。需要根据 cosφ=x0/A 和 sinφ=−v0/(Aω) 的符号来判断 φ 所在的象限。
推荐方法:使用 arctan2 函数(大多数编程语言和计算器都支持):
φ=arctan2(−ωv0,x0) arctan2(y, x) 自动根据 x 和 y 的符号确定正确的象限。
4.2 用线性组合形式求解
另一种常用的方法是利用通解的线性组合形式:
x(t)=C1cos(ωt)+C2sin(ωt) 此时:
x0=C1cos0+C2sin0=C1 v0=−C1ωsin0+C2ωcos0=C2ω 因此:
C1=x0,C2=ωv0 进而:
A=C12+C22=x02+(ωv0)2 φ=arctan2(−C2,C1)=arctan2(−ωv0,x0) 两种方法结果一致。
4.3 典型初始条件
初始条件 | x0 | v0 | A | φ | 运动方程 |
|---|
从正最大位移处释放 | A | 0 | x0 | 0 | x=x0cos(ωt) |
从平衡位置向正方向运动 | 0 | >0 | v0/ω | −π/2 | x=ωv0sin(ωt) |
从平衡位置向负方向运动 | 0 | <0 | ∣v0∣/ω | π/2 | x=−ω∣v0∣sin(ωt) |
从负最大位移处释放 | −A | 0 | ∣x0∣ | π | x=−∣x0∣cos(ωt) |
4.4 相图理解
相图是以位移 x 为横坐标、速度 v 为纵坐标的平面。对于简谐运动:
A2x2+(Aω)2v2=cos2(ωt+φ)+sin2(ωt+φ)=1 这是一个椭圆(当横纵坐标比例相同时为圆),称为相轨迹。
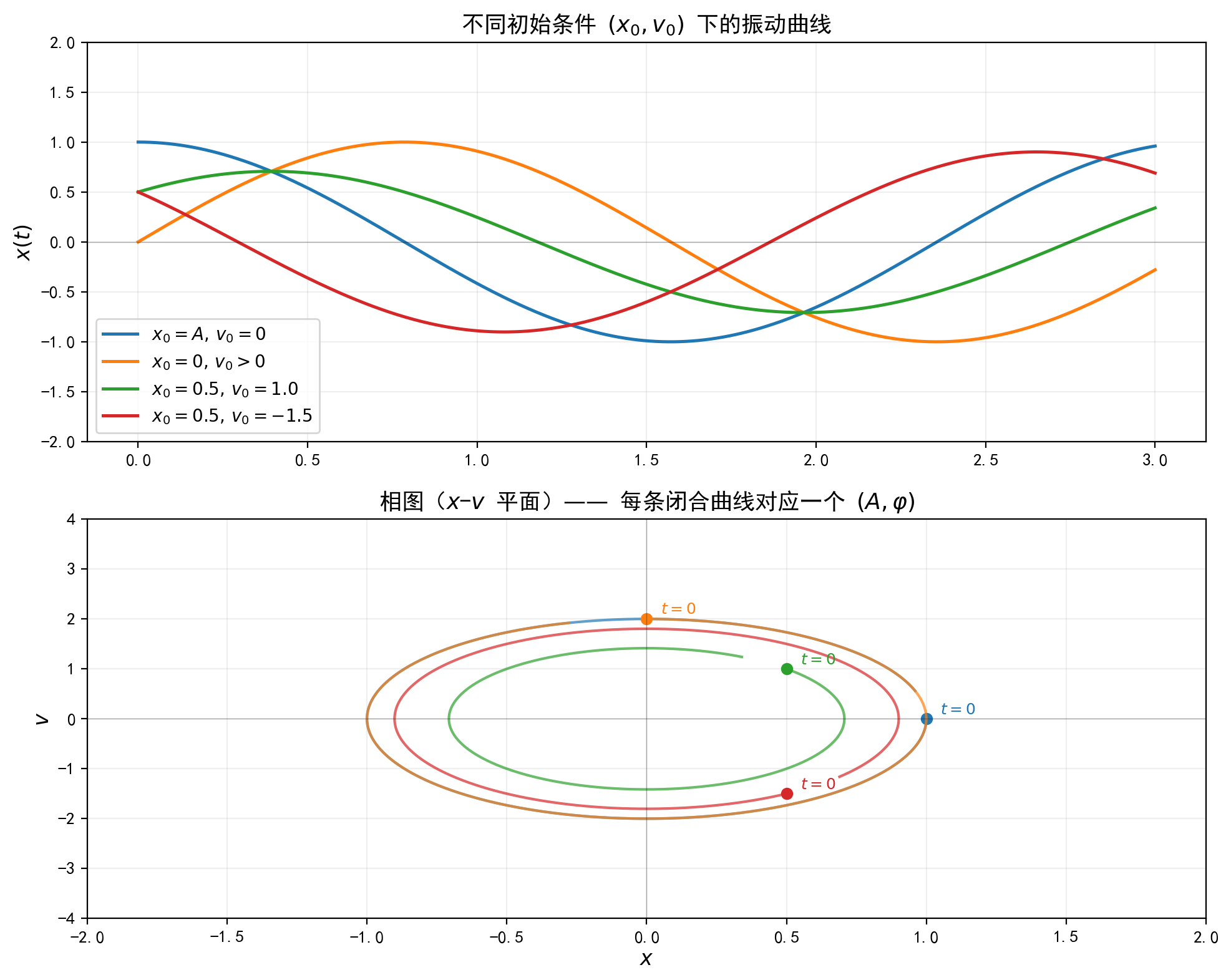
图4-1 上图:四组不同的初始条件 (x0,v0) 对应的振动曲线。不同 A 导致振幅不同,不同 φ 导致起始相位不同。下图:相图(x-v 平面)。每条闭合椭圆曲线对应一个振幅 A,椭圆上 t=0 的标记点即为初始状态。椭圆越大,振幅越大。
本章小结:
由初始条件 x0,v0 求解振幅和初相位的公式:A=x02+(v0/ω)2,φ=arctan2(−v0/ω,x0)
求解 φ 时务必注意象限判断
相图是理解初始条件与运动状态关系的有力工具
第5章 旋转矢量法
旋转矢量法(又称相量法、参考圆法)是描述和分析简谐运动的一种几何方法。它将一维的简谐运动与二维的匀速圆周运动联系起来,使抽象的相位概念变得直观可视。
5.1 旋转矢量的基本原理
构造方法
考虑一个长度为 A 的矢量 A,其起点固定在坐标原点 O,以恒定角速度 ω 在 xy 平面内逆时针旋转。设 t=0 时,A与 x 轴正方向的夹角为 φ(初相位)。
在任意时刻 t,A 与 x 轴正方向的夹角为:
θ(t)=ωt+φ 矢量 A 在 x 轴上的投影为:
x=Acosθ(t)=Acos(ωt+φ) 这正是简谐运动的运动方程!
对应关系
旋转矢量 | 简谐运动 |
|---|
矢量长度 A | 振幅 |
旋转角速度 ω | 角频率 |
与 x 轴夹角 ωt+φ | 相位 |
初始夹角 φ | 初相位 |
旋转一周的时间 2π/ω | 周期 T |
矢量端点在 x 轴上的投影 | 位移 x(t) |
矢量端点在 x 轴上的投影速度 | 速度 v(t) |
矢量端点在 x 轴上的投影加速度 | 加速度 a(t) |
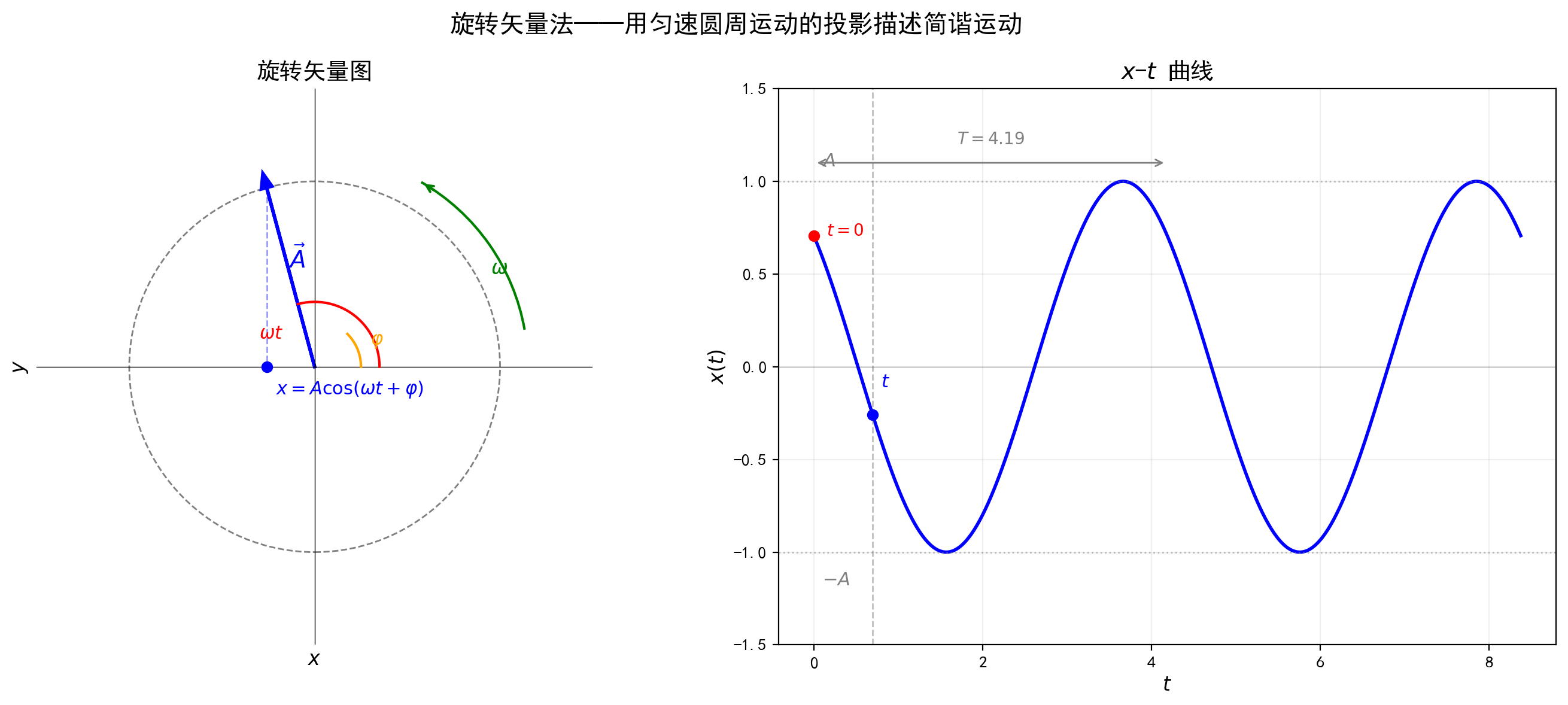
图5-1 左图:旋转矢量图。矢量 A 以角速度 ω 逆时针旋转,其与 x 轴的夹角 ωt+φ 即为相位。矢量在 x 轴上的投影 x=Acos(ωt+φ) 即为简谐运动的位移。右图:对应的 x-t 曲线,t=0 时的红色标记点对应左图中矢量的初始位置。
5.2 速度和加速度的几何解释
速度
旋转矢量端点的线速度大小为 v端点=Aω,方向垂直于 A (即沿圆周切线方向)。该速度在 x 轴上的投影为:
v=−Aωsin(ωt+φ) 这正是简谐运动的速度表达式。几何上:
加速度
旋转矢量端点的向心加速度大小为 a端点=Aω2,方向指向圆心。该加速度在 x 轴上的投影为:
a=−Aω2cos(ωt+φ)=−ω2x 这正是简谐运动的加速度表达式。
5.3 用旋转矢量法求相位差
两个同频率的简谐运动:
x1=A1cos(ωt+φ1) x2=A2cos(ωt+φ2) 可以用两个旋转矢量 A1 和 A2 来表示。由于它们以相同的角速度 ω 旋转,它们之间的夹角保持不变:
Δφ=φ2−φ1 这个恒定的夹角就是两个振动的相位差。
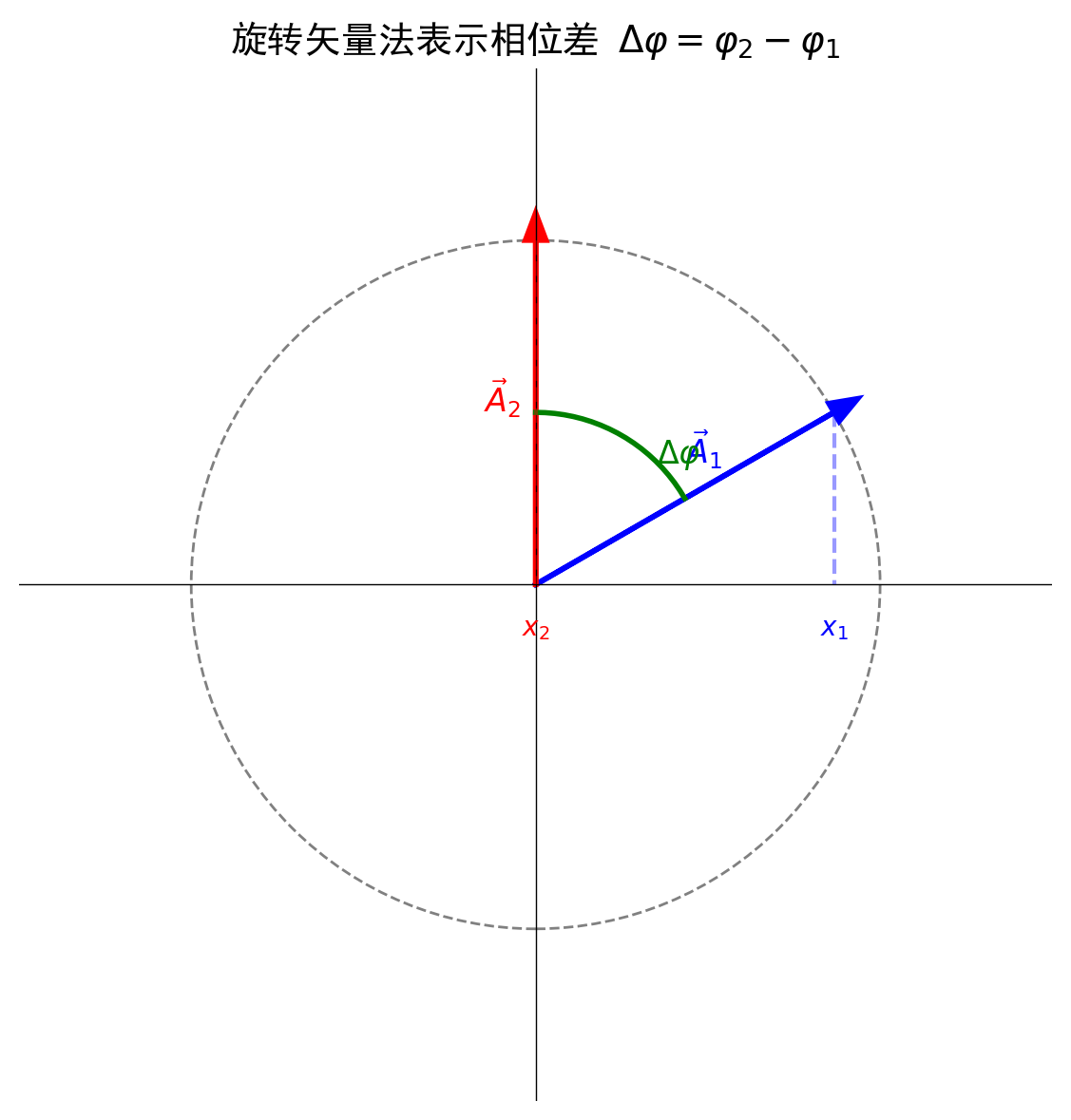
图5-2 两个同频率简谐运动的旋转矢量表示。A1 和 A2 以相同的角速度 ω 旋转,它们之间的夹角 Δφ=φ2−φ1 保持不变。
相位差的物理含义
Δφ=0:两振动同相,同时达到最大值、同时过平衡位置
Δφ=π:两振动反相,一个达正最大时另一个达负最大
Δφ=π/2:两振动相位差 90∘,一个达最大时另一个过平衡位置
0<Δφ<π:称 x2 超前 x1(或 x1 滞后 x2)
−π<Δφ<0:称 x2 滞后 x1(或 x1 超前 x2)
判断超前/滞后的技巧:在旋转矢量图中,逆时针方向为相位增加的方向。如果 A2 在 A1 的逆时针方向,则 x2 超前 x1。
5.4 旋转矢量法的优势
直观理解相位:相位不再是抽象的角度参数,而是矢量在圆周上的"位置"
方便比较相位差:两个振动的相位差就是两个矢量的夹角
为振动合成做准备:多个简谐运动的合成可以转化为矢量合成(第9章)
统一处理正弦和余弦:在旋转矢量框架下,cos 和 sin 只是初始角度不同
本章小结:
第6章 弹簧振子
弹簧振子是简谐运动最典型、最重要的物理模型。本章详细分析水平弹簧振子和竖直弹簧振子的运动规律。
6.1 水平弹簧振子
系统描述
质量为 m 的物块连接在劲度系数为 k 的轻质弹簧一端,弹簧另一端固定在墙上,物块在光滑水平面上运动(无摩擦)。
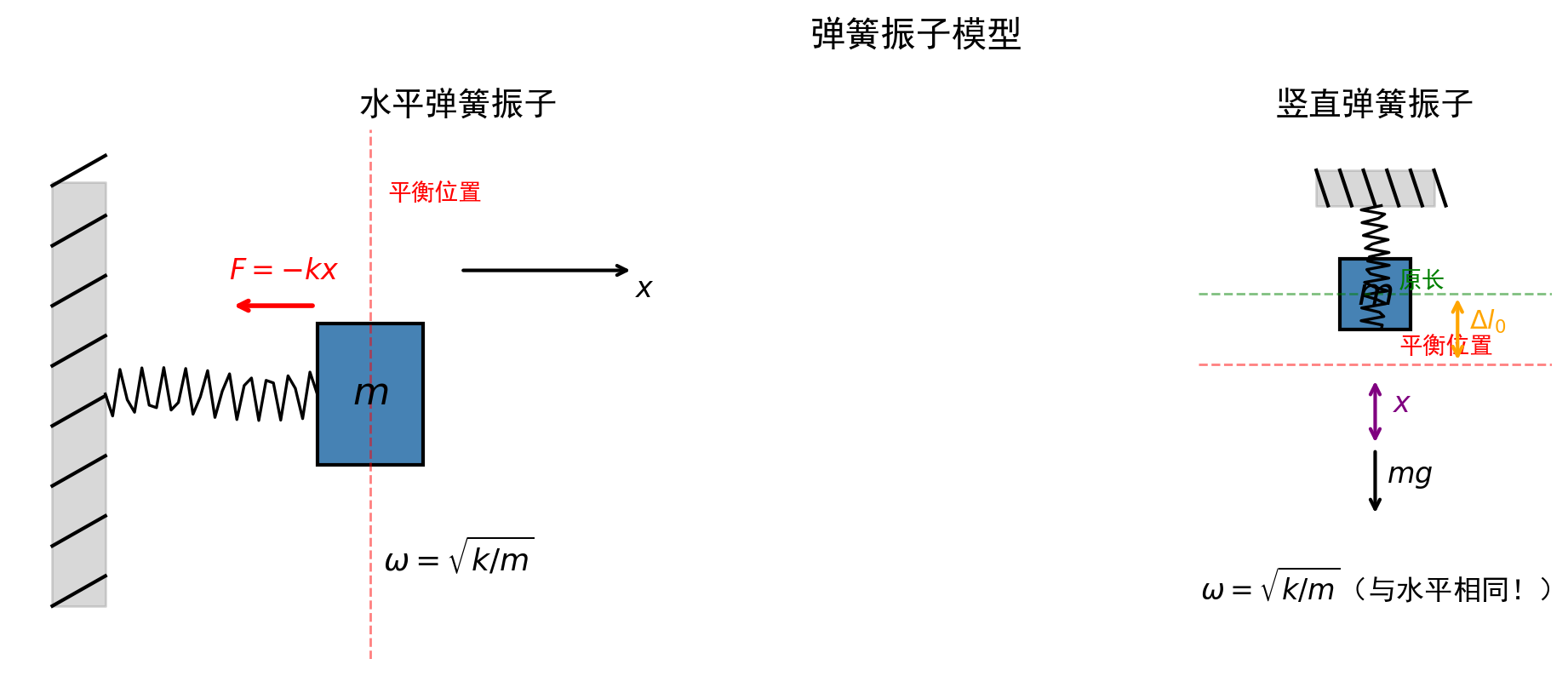
图6-1 左图:水平弹簧振子。物块在弹性回复力 F=−kx 作用下做简谐运动。右图:竖直弹簧振子。重力使弹簧产生静伸长 Δl0=mg/k,但振动仍围绕新的平衡位置进行,角频率与水平情况相同。
受力分析
以弹簧原长时物块的位置为坐标原点 O,向右为 x 轴正方向。物块受到的弹性力为:
由牛顿第二定律:
mx¨=−kx 即:
x¨+mkx=0 令 ω2=k/m,得标准形式:
x¨+ω2x=0 运动方程
x(t)=Acos(ωt+φ) 其中:
ω=mk,T=2πkm,ν=2π1mk 关键结论
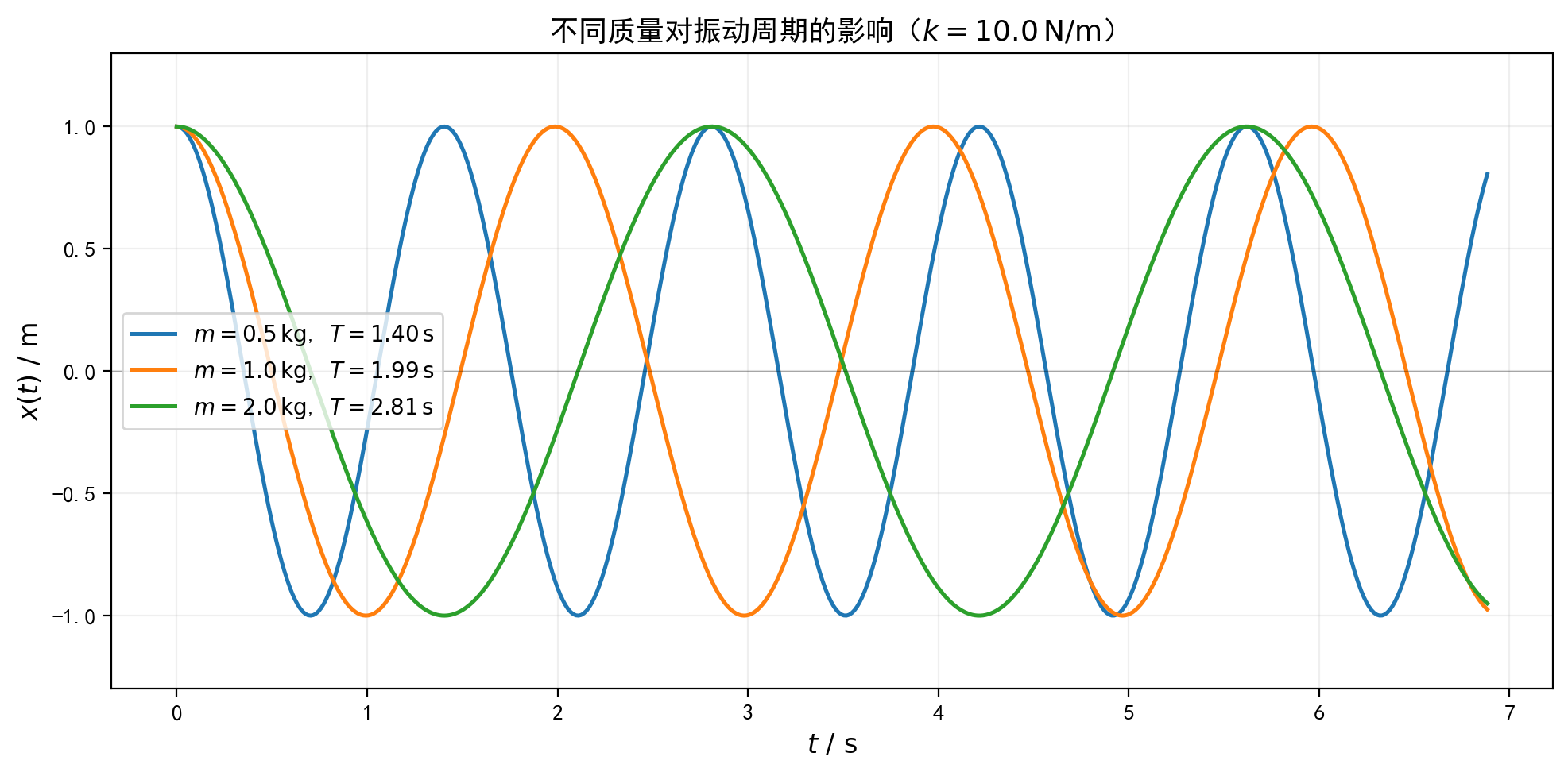
图6-2 劲度系数 k=10.0N/m 固定时,不同质量的振动曲线。质量越大,周期越长(振动越慢),但振幅相同。
6.2 竖直弹簧振子
系统描述
弹簧竖直悬挂,下端挂质量为 m 的物块。物块在竖直方向上振动。
平衡位置
挂上物块后,弹簧被拉伸。设静平衡时弹簧的伸长量为 Δl0,则:
kΔl0=mg⇒Δl0=kmg 以平衡位置为坐标原点,向下为 x 轴正方向。
受力分析
当物块偏离平衡位置 x 时,弹簧的总伸长为 Δl0+x,物块受两个力:
弹簧拉力(向上):F弹=−k(Δl0+x)
重力(向下):Fg=mg
合力:
F=mg−k(Δl0+x)=mg−kΔl0−kx=−kx 关键:重力 mg 和静伸长对应的弹力 kΔl0 恰好抵消!因此回复力仍然是 F=−kx,与水平弹簧振子完全相同。
运动方程
mx¨=−kx⇒x¨+mkx=0 ω=mk 重要结论
竖直弹簧振子的角频率与水平弹簧振子完全相同!
ω=mk 重力的作用仅仅是改变了平衡位置(产生了静伸长 Δl0),但不改变振动的角频率。
一般规律:恒力(如重力)只改变平衡位置,不改变振动的角频率。只有当回复力的"刚度系数"发生变化时,角频率才会改变。
6.3 等效劲度系数
当系统中有多个弹簧时,可以用等效劲度系数 keq 将系统简化为单一弹簧模型。
弹簧串联
两个弹簧(劲度系数 k1 和 k2)串联:
keq1=k11+k21⇒keq=k1+k2k1k2 等效劲度系数比任何一个弹簧都"软"。
弹簧并联
两个弹簧并联:
keq=k1+k2 等效劲度系数比任何一个弹簧都"硬"。
角频率
无论串联还是并联,角频率均为:
ω=mkeq 本章小结:
第7章 单摆与物理摆
单摆和物理摆是两类重要的振动系统。它们不是由弹性力驱动,而是由重力的回复作用驱动。在小角度条件下,它们都做简谐运动。
7.1 单摆
7.1.1 系统描述
单摆(Simple Pendulum)由一根不可伸长的轻质细线(或细杆)和一个质点(摆球)组成。细线的一端固定在支点上,摆球在竖直平面内摆动。
理想单摆的假设:
7.1.2 运动方程
设摆长为 l,摆球质量为 m,摆角为 θ(与竖直方向的夹角)。
摆球受到两个力:重力 mg 和线的张力 T。将重力分解为:
只有切向分量产生回复效果。由牛顿第二定律(切向):
maτ=−mgsinθ 其中切向加速度 aτ=lθ¨(弧长 s=lθ,故 s¨=lθ¨)。
代入得:
mlθ¨=−mgsinθ 即:
θ¨+lgsinθ=0(7-1) 7.1.3 小角度近似
方程 (7-1) 是非线性微分方程(因为含有 sinθ),一般情况下没有解析解。
当摆角很小时(θ 以弧度为单位),利用泰勒展开:
sinθ=θ−6θ3+⋯ 保留第一项,得到小角度近似:
sinθ≈θ 代入 (7-1) 得线性化方程:
θ¨+lgθ=0(7-2) 这正是简谐运动的标准微分方程!
令 ω2=g/l,则:
ω=lg,T=2πgl(7-3) 7.1.4 小角度近似的精度
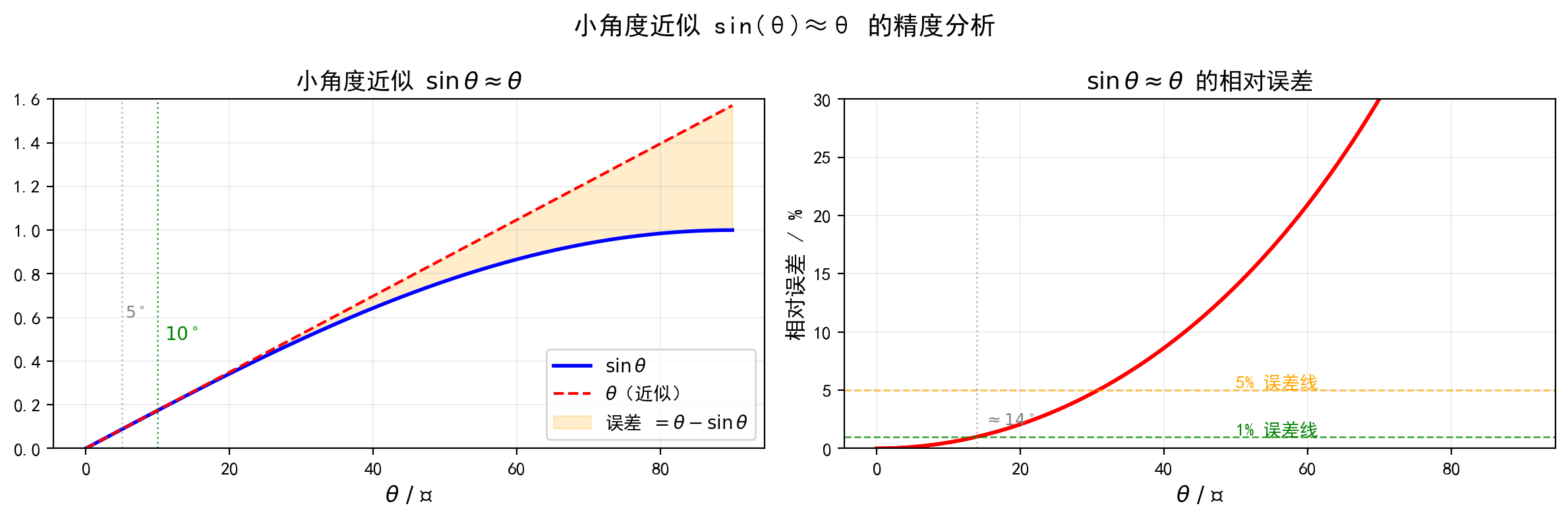
图7-2 左图:sinθ(蓝色实线)与 θ(红色虚线)的比较。角度越小,两条曲线越接近。右图:相对误差曲线。θ<5∘ 时误差 <0.1%;θ<10∘∘ 时误差 <0.5%;θ≈14∘ 时误差约 1%。
实用建议:在工程和实验中,通常认为 θ<5∘ 时小角度近似足够精确。但在理论分析中,θ<10∘ 的近似也广泛使用。
7.1.5 单摆的重要性质
周期与质量无关:T=2πl/g 不含 m
周期与振幅无关(在小角度范围内):等时性
周期与摆长的平方根成正比:T∝l
周期与重力加速度的平方根成反比:T∝1/g(可用于测量 g)
7.2 物理摆
7.2.1 系统描述
物理摆(Physical Pendulum / Compound Pendulum)是任意形状的刚体绕一固定水平轴在竖直平面内摆动的系统。
与单摆的区别:
单摆:质量集中在一点(质点)
物理摆:质量分布在刚体上(需要考虑转动惯量)
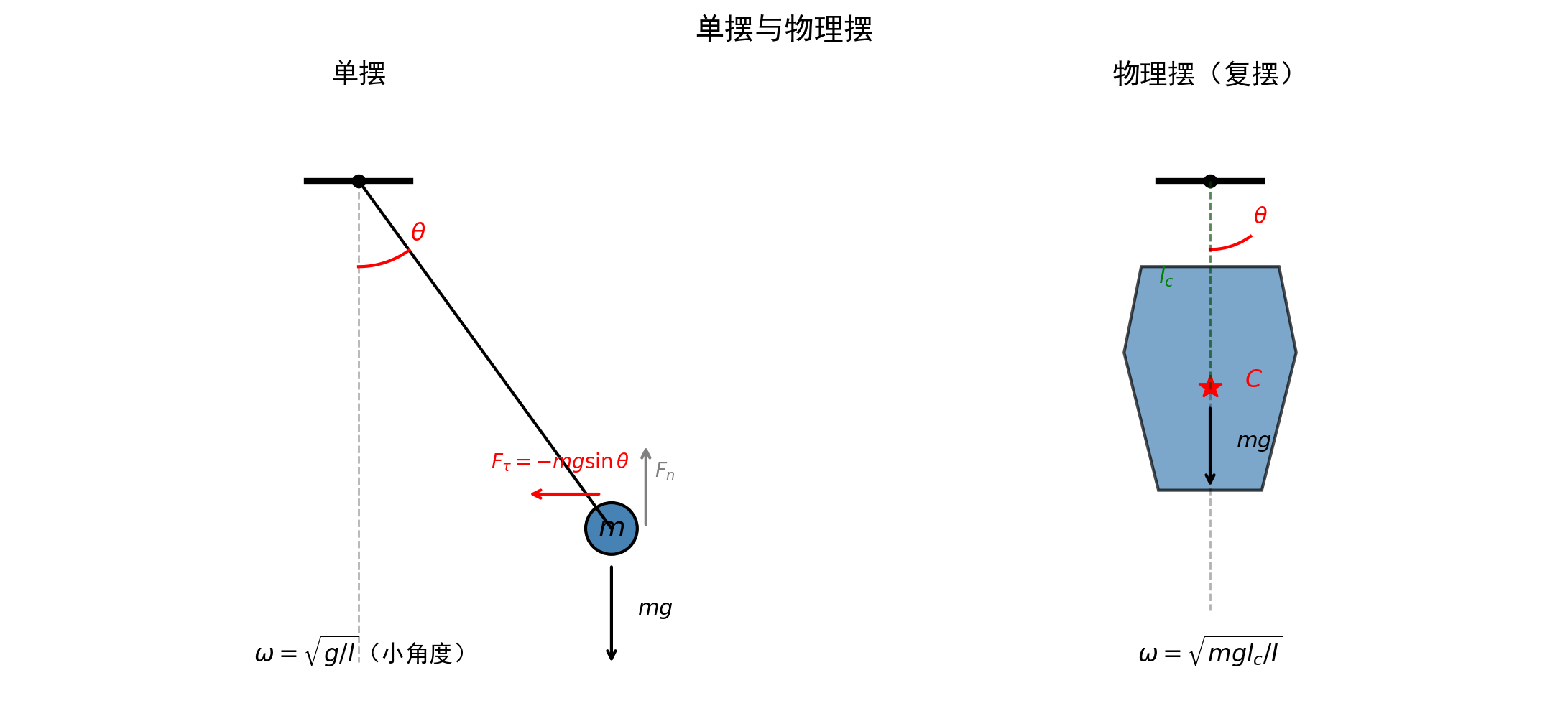
图7-1 左图:单摆——质点 m 用轻线悬挂,回复力为重力的切向分量 Fτ=−mgsinθ。右图:物理摆——刚体绕固定轴摆动,回复力矩由重力对质心 C 的作用产生。
7.2.2 运动方程
设:
刚体质量为 m
质心 C 到转轴的距离为 lc
刚体对转轴的转动惯量为 I
偏离平衡位置的角度为 θ
重力对转轴的力矩(回复力矩):
τ=−mglcsinθ 由转动定律 τ=Iθ¨:
Iθ¨=−mglcsinθ 即:
θ¨+Imglcsinθ=0(7-4) 小角度近似下:
θ¨+Imglcθ=0 令 ω2=Imglc,则:
ω=Imglc,T=2πmglcI(7-5) 7.2.3 等效单摆长
可以将物理摆等效为一个单摆。令等效摆长为 leq,要求两者周期相同:
2πgleq=2πmglcI 解得:
leq=mlcI(7-6) 这个等效摆长称为折合摆长或等效单摆长。物理摆的运动等效于一个摆长为 leq 的单摆。
利用平行轴定理 I=Ic+mlc2(Ic 为刚体对过质心且平行于转轴的轴的转动惯量):
leq=mlcIc+mlc2=mlcIc+lc>lc 即等效摆长总是大于质心到转轴的距离。
本章小结:
单摆:ω=g/l,周期 T=2πl/g(小角度近似)
物理摆:ω=mglc/I,周期 T=2πI/(mglc)
小角度近似 sinθ≈θ 在 θ<5∘ 时误差 <0.1%
物理摆可等效为摆长 leq=I/(mlc) 的单摆
第8章 简谐运动的能量
本章从能量角度分析简谐运动,揭示动能和势能的周期性转换以及总能量的守恒。
8.1 动能和势能
考虑弹簧振子模型,质量为 m,弹簧劲度系数为 k,角频率 ω=k/m。
位移和速度
x(t)=Acos(ωt+φ) v(t)=−Aωsin(ωt+φ) 动能
Ek=21mv2=21mA2ω2sin2(ωt+φ) 利用 ω2=k/m,即 mω2=k:
Ek=21kA2sin2(ωt+φ)(8-1) 势能
弹簧的弹性势能(以平衡位置为零势能点):
Ep=21kx2=21kA2cos2(ωt+φ)(8-2) 总能量
E=Ek+Ep=21kA2[sin2(ωt+φ)+cos2(ωt+φ)]=21kA2(8-3) 总能量为常量! 这验证了简谐运动是保守系统(无能量耗散)。
8.2 能量的时间变化
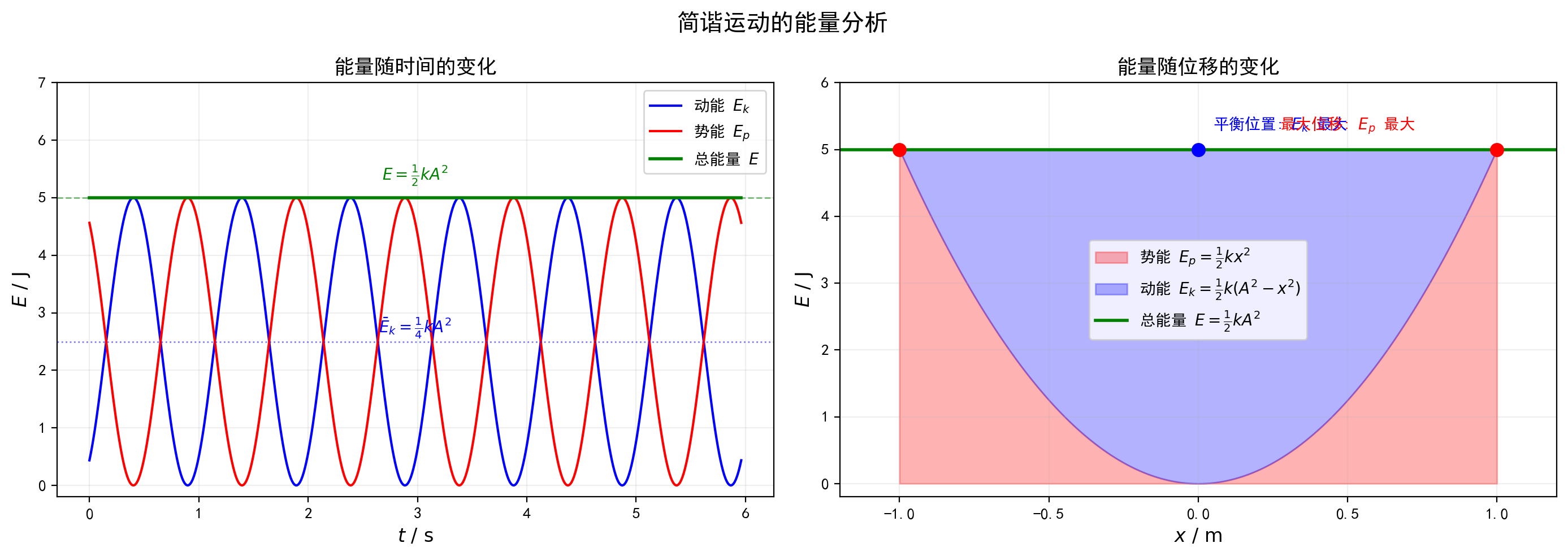
图8-1 左图:动能 Ek(蓝色)、势能 Ep(红色)和总能量 E(绿色)随时间的变化。动能和势能以频率 2ω 周期性变化(是位移变化频率的两倍),总能量恒定。动能和势能各自的平均值为总能量的一半。右图:能量随位移的变化。在平衡位置 x=0 处动能最大;在最大位移 x=±A 处势能最大。
关键特征
总能量守恒:E=21kA2 常量
能量与振幅的关系:E∝A2,振幅越大,总能量越大
动能和势能同频率变化:Ek 和 Ep 的变化频率为 2ω(是振动频率的两倍),因为 sin2 和 cos2 的周期为 π
动能和势能互补:当 Ek 最大时 Ep=0,当 Ep 最大时 Ek=0
平均能量:在一个周期内,动能和势能的平均值相等:
Eˉk=Eˉp=41kA2=2E
能量转换过程
位置 | 位移 | 速度 | 动能 | 势能 |
|---|
平衡位置 | 0 | ±Aω | 21kA2 | 0 |
正最大位移 | +A | 0 | 0 | 21kA2 |
平衡位置 | 0 | ∓Aω | 21kA2 | 0 |
负最大位移 | −A | 0 | 0 | 21kA2 |
8.3 势能曲线
简谐振动的势能函数 Ep(x)=21kx2 是一条抛物线,称为谐振势阱。
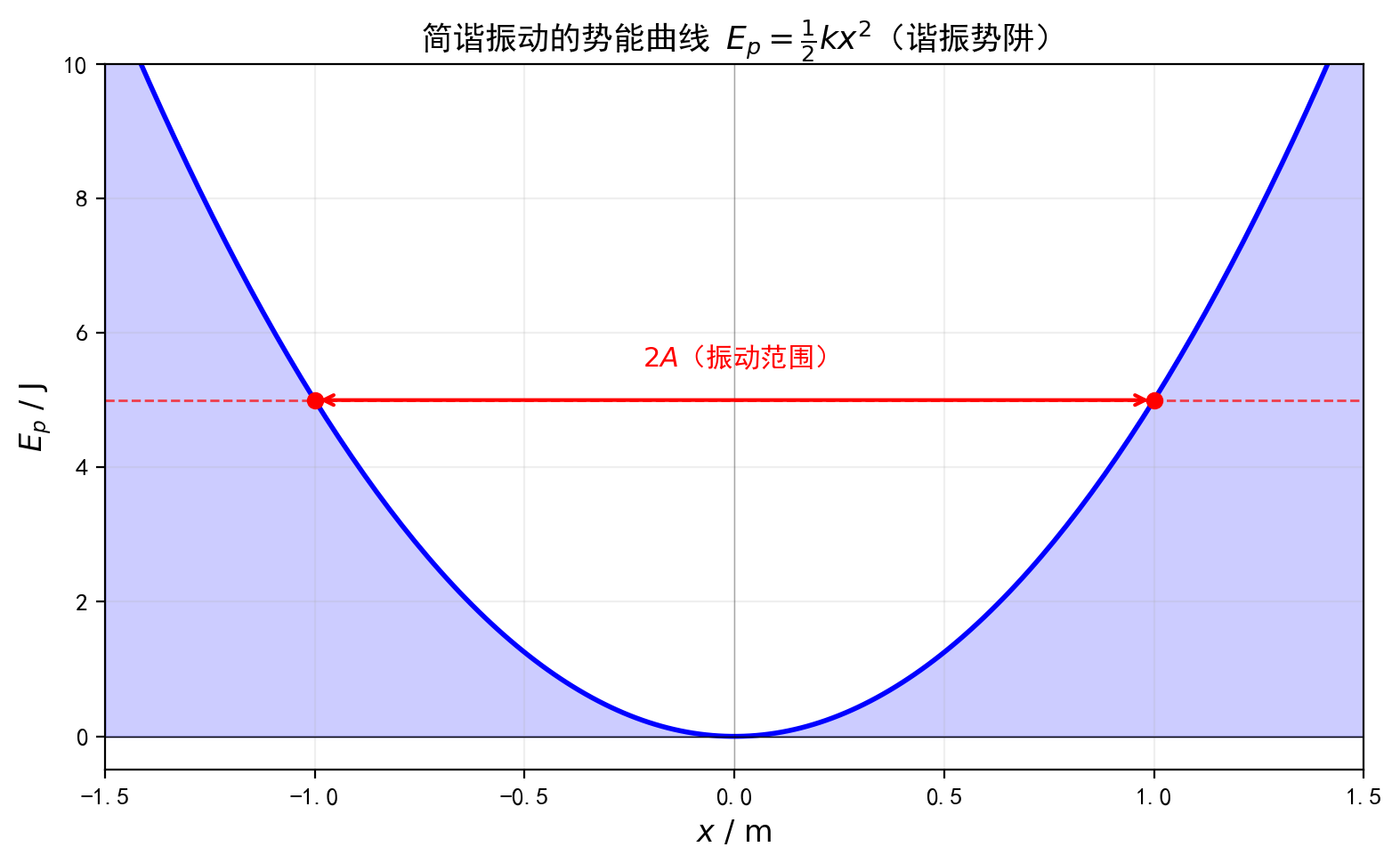
图8-2 谐振势阱 Ep=21kx2。红色虚线表示总能量 E=21kA2,它与势能曲线的两个交点对应振动的两个转向点 x=±A。在势阱底部(x=0),势能最小(取为零),动能最大。
势阱的物理含义
8.4 其他振动系统的能量
单摆
单摆的势能(以最低点为零势能点):
Ep=mgl(1−cosθ) 小角度近似下 cosθ≈1−θ2/2:
Ep≈21mglθ2=21(mgl)θ2 这与谐振势的形式一致,等效劲度系数为 keq=mgl。
物理摆
Ep=mglc(1−cosθ)≈21mglcθ2 等效劲度系数为 keq=mglc。
本章小结:
动能 Ek=21kA2sin2(ωt+φ),势能 Ep=21kA2cos2(ωt+φ)
总能量 E=21kA2 守恒,与振幅的平方成正比
动能和势能的变化频率为 2ω,平均值各为总能量的一半
势能曲线 Ep=21kx2 是抛物线(谐振势阱)
第9章 同方向同频率的两个简谐运动的合成
两个同方向、同频率的简谐运动叠加后,合运动**仍然是简谐运动**,频率不变,但振幅和相位发生变化。这是叠加原理的直接应用。
9.1 合成公式
设有两个同方向同频率的简谐运动:
x1=A1cos(ωt+φ1) x2=A2cos(ωt+φ2) 合位移为:
x=x1+x2=A1cos(ωt+φ1)+A2cos(ωt+φ2) 利用三角恒等式展开:
x=(A1cosφ1+A2cosφ2)cos(ωt)−(A1sinφ1+A2sinφ2)sin(ωt) 令:
C1=A1cosφ1+A2cosφ2 C2=−(A1sinφ1+A2sinφ2) 则:
x=C1cos(ωt)+C2sin(ωt)=Acos(ωt+φ) 其中合振幅A 和合初相位φ 为:
A=C12+C22=A12+A22+2A1A2cos(φ2−φ1)(9-1) φ=arctan2(−C2,C1)=arctan2(A1cosφ1+A2cosφ2A1sinφ1+A2sinφ2)(9-2) > 关键结论:两个同方向同频率的简谐运动的合成仍为同频率的简谐运动,合振幅A 和合初相位φ 由公式 (9-1) 和 (9-2) 给出。
9.2 旋转矢量法求合成
利用旋转矢量法,两个振动分别对应旋转矢量A1 和A2。由于它们以相同角速度旋转,夹角Δφ=φ2−φ1 保持不变。
合矢量A=A1+A2 由平行四边形法则确定。由余弦定理:
A2=A12+A22+2A1A2cos(Δφ) 这与公式 (9-1) 一致。旋转矢量法的优势在于可以直接作图得到合振幅和合相位,避免繁琐的三角运算。
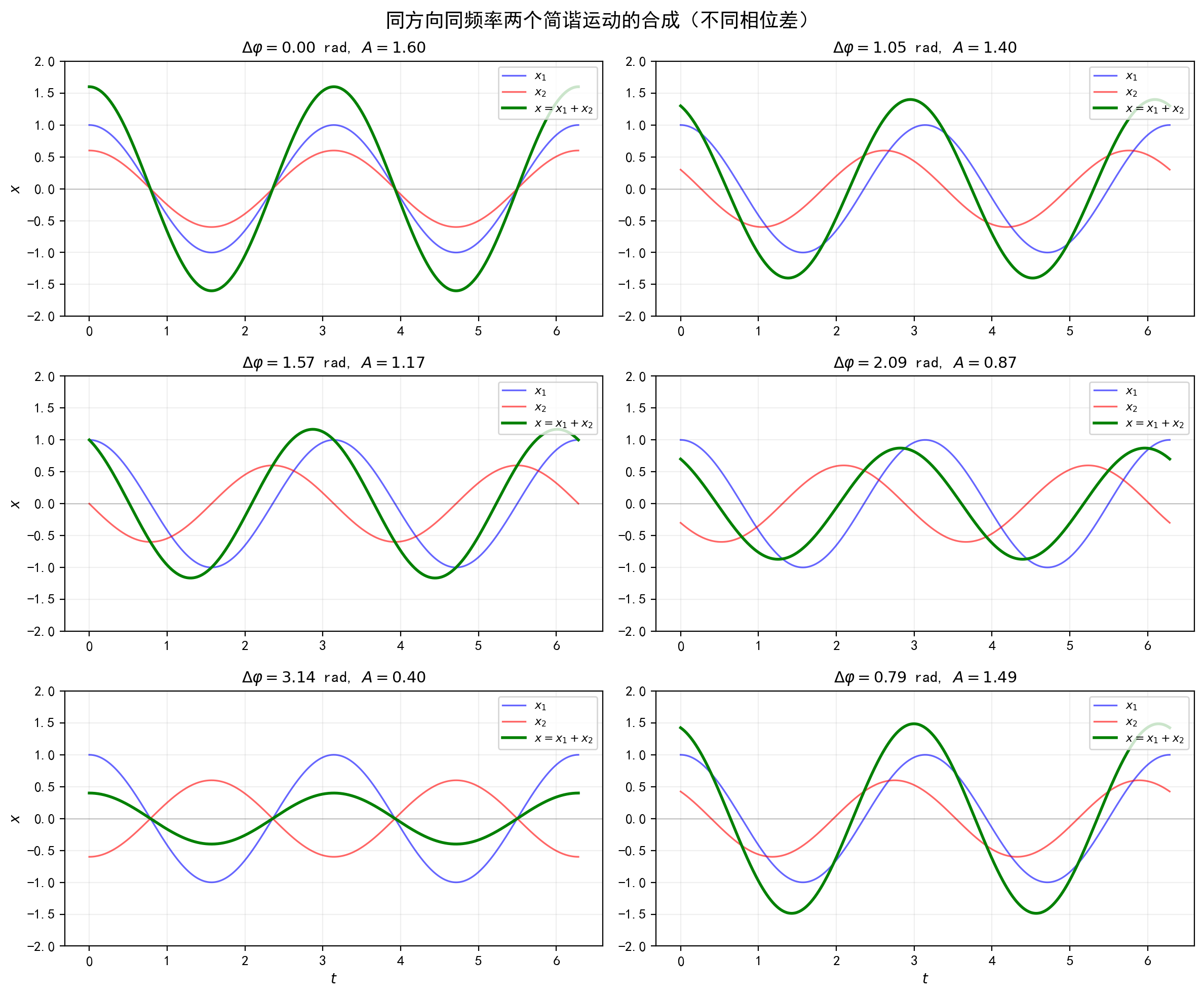
图9-1 六种不同相位差Δφ 下的合成结果。蓝色和红色分别为两个分振动,绿色为合振动。当Δφ=0 时振幅最大(Δφ=0);当Δφ=π 时振幅最小(A=∣A1−A2∣=0.40)。
9.3 两种特殊情况
(1) 同相:Δφ=0,2π,4π,…
A=A1+A2(最大振幅) 两个振动"步调一致",同时达到最大值、同时过平衡位置,互相加强。
(2) 反相:Δφ=π,3π,5π,…
A=∣A1−A2∣(最小振幅) 两个振动"步调相反",一个达正最大时另一个达负最大,**互相削弱**。
特别地,当A1=A2 且反相时:A=0,合运动为零(完全抵消)。
## 9.4 合振幅与相位差的关系
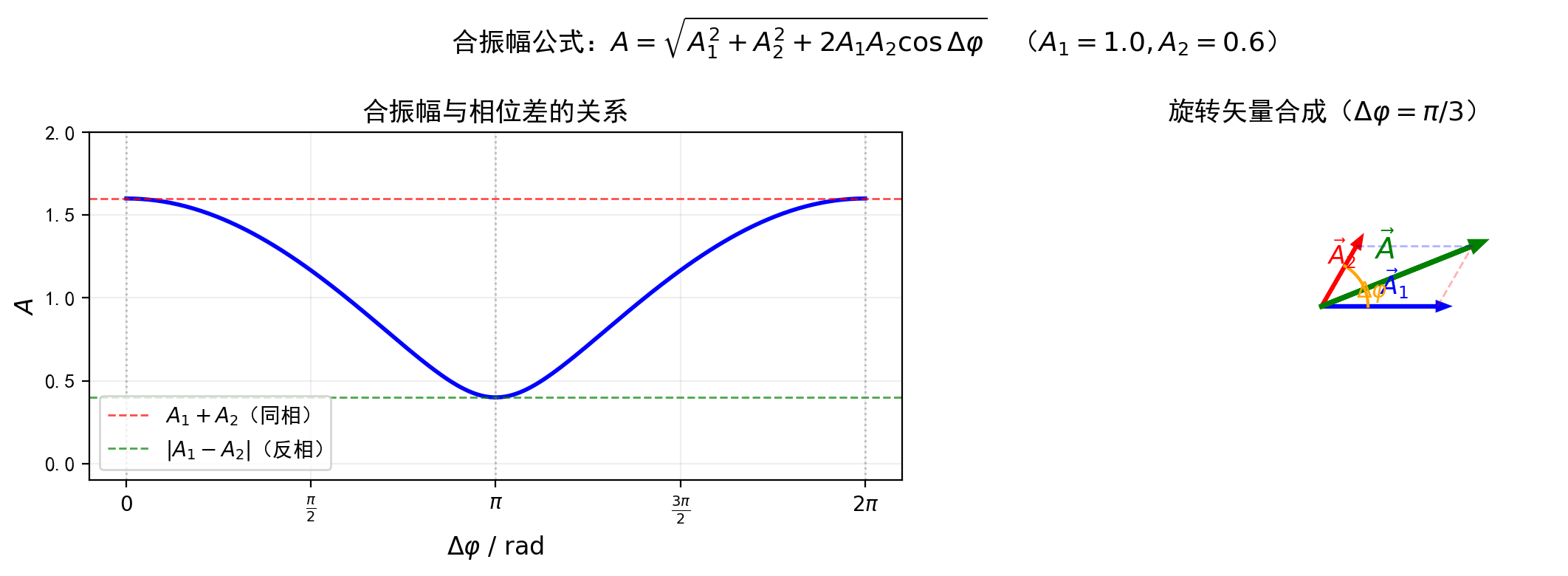
图9-2 左图:合振幅A 随相位差Δφ 的变化曲线(A1=1.0,A2=0.6)。Δφ=0(同相)时A=A1+A2=1.6 最大;Δφ=π(反相)时A=∣A1−A2∣=0.4 最小。右图:旋转矢量合成的几何图示——合矢量A=A1+A2 由平行四边形法则确定。
一般情况
-cos(Δφ)>0(0<∣Δφ∣<π/2):A>A12+A22,合成加强
-cos(Δφ)<0(π/2<∣Δφ∣<π):A<A12+A22,合成削弱
-cos(Δφ)=0(Δφ=±π/2):A=A12+A22
9.5 合振动的能量
合振动的总能量:
E=21kA2=21k[A12+A22+2A1A2cos(Δφ)]=E1+E2+kA1A2cos(Δφ) 其中E1=21kA12,E2=21kA22 分别为两个分振动的能量。
干涉项kA1A2cos(Δφ) 的存在说明:合能量不等于分能量之和。这正是波的干涉现象的能量基础。
- 同相时:E=E1+E2+2E1E2>E1+E2(能量加强)
- 反相时:E=E1+E2−2E1E2<E1+E2(能量削弱)
本章小结:
- 同方向同频率的两个简谐运动合成后仍为同频率的简谐运动
- 合振幅A=A12+A22+2A1A2cos(Δφ)
- 同相时振幅最大A=A1+A2,反相时振幅最小A=∣A1−A2∣
- 旋转矢量法是求解合成的便捷几何工具
第10章 互相垂直方向同频率的两个简谐运动的合成——李萨如图形
当一个质点同时在 x 方向和 y 方向做同频率的简谐运动时,其合运动的轨迹是一条闭合曲线,称为李萨如图形(Lissajous Figure)。
10.1 运动方程
设质点在两个互相垂直的方向上分别做简谐运动:
xy=Acos(ωt+φ1)=Bcos(ωt+φ2)(10-1) 其中 A 和 B 分别为两个方向的振幅,ω 为共同的角频率,φ1 和 φ2 为两个方向的初相位。
10.2 轨迹方程(消去时间 t)
令 Δφ=φ2−φ1 为两个振动的相位差。将式 (10-1) 展开:
AxBy=cos(ωt+φ1)=cos(ωt+φ1+Δφ)=cos(ωt+φ1)cos(Δφ)−sin(ωt+φ1)sin(Δφ) 消去 cos(ωt+φ1) 和 sin(ωt+φ1)(利用 cos2+sin2=1),得到轨迹方程:
A2x2+B2y2−AB2xycos(Δφ)=sin2(Δφ)(10-2) 这是一个二次曲线方程,其具体形状取决于相位差 Δφ。
10.3 不同相位差下的轨迹
(1)Δφ=0(同相)
A2x2+B2y2−AB2xy=0⇒(Ax−By)2=0 y=ABx 轨迹为一条过原点的直线,斜率为 B/A。质点沿直线做往复运动。
(2) Δφ=π(反相)
A2x2+B2y2+AB2xy=0⇒(Ax+By)2=0 轨迹仍为直线,但斜率为 −B/A。
(3) Δφ=±π/2(正交)
A2x2+B2y2=1 轨迹为椭圆,主轴沿坐标轴方向。
特别地,当 A=B 时:
x2+y2=A2 轨迹为圆,质点做匀速圆周运动!
(4) 一般情况
对于任意 Δφ,方程 (10-2) 描述的是一个倾斜的椭圆(主轴不沿坐标轴)。
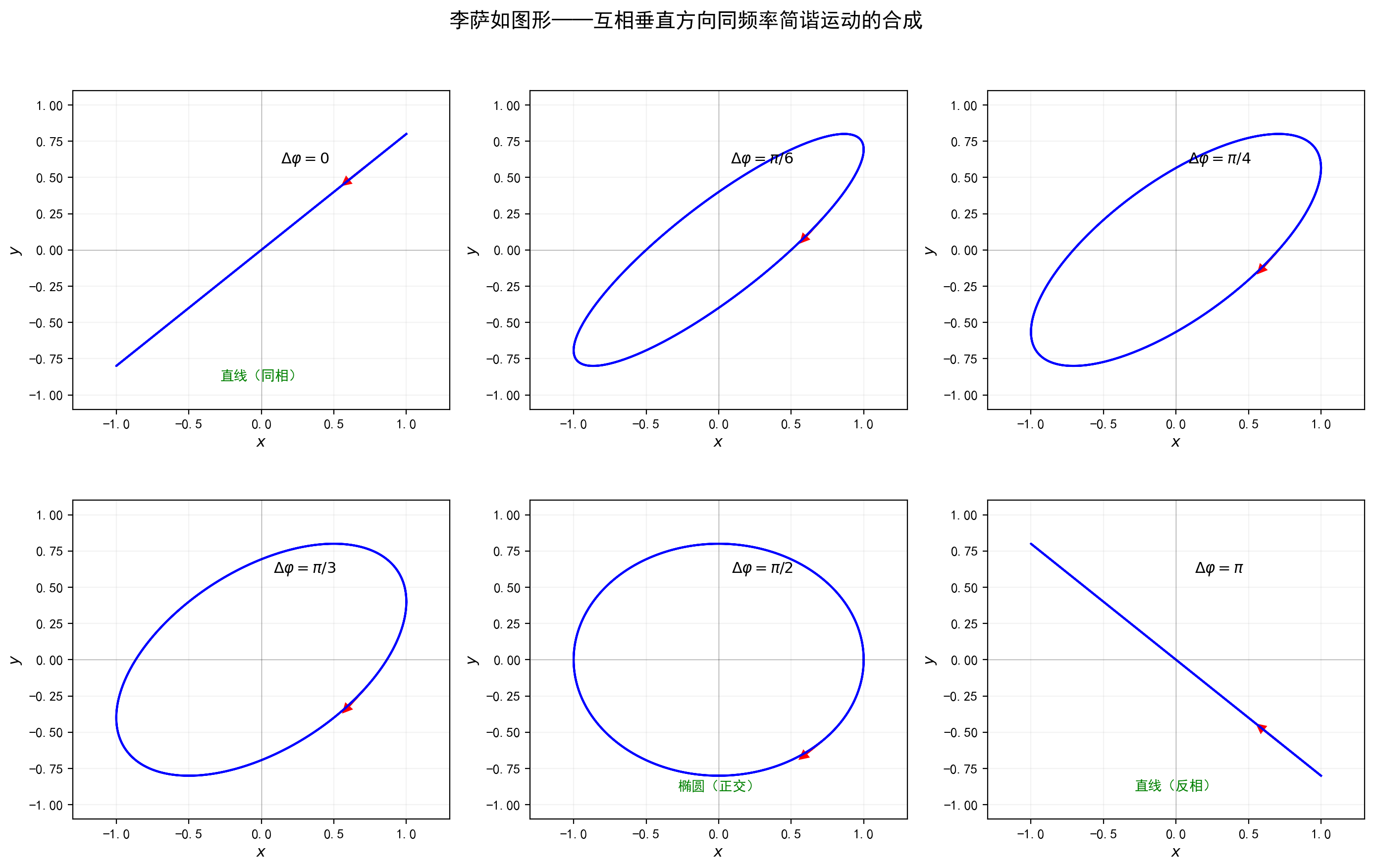
图10-1 六种不同相位差下的李萨如图形(A=1.0, B=0.8)。Δφ=0 时为直线(同相);Δφ=π 时为直线(反相);Δφ=π/2 时为正椭圆;其余情况为倾斜椭圆。红色箭头表示运动方向。
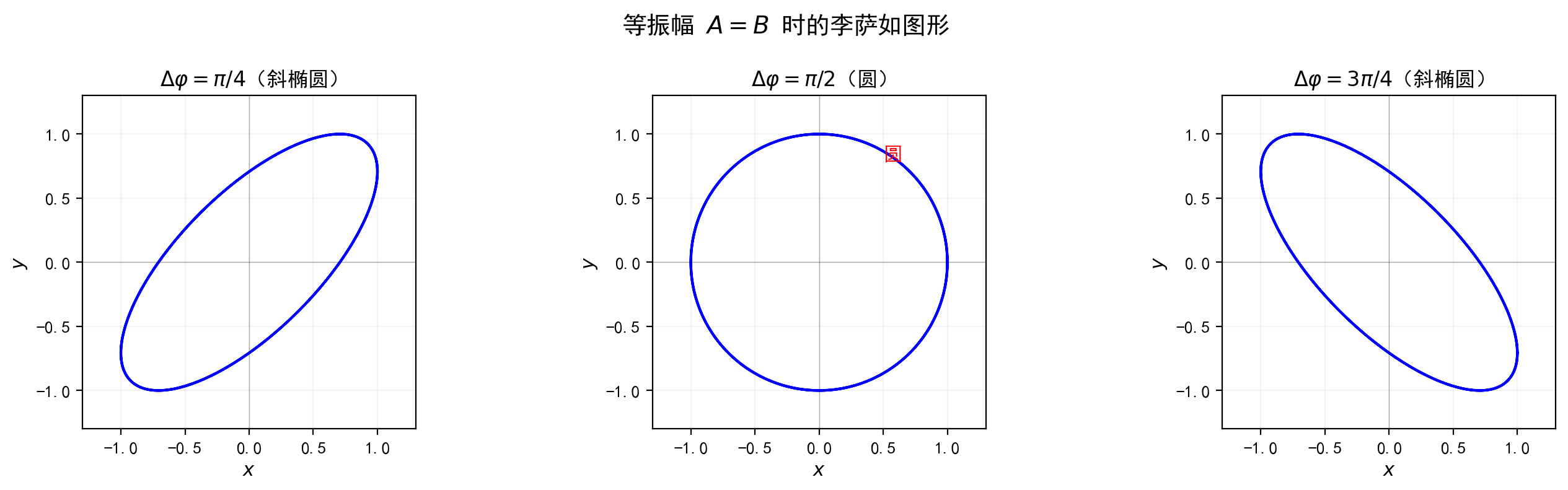
图10-2 当 A=B 时,Δφ=π/2 得到正圆,Δφ=π/4 和 3π/43π/4 得到倾斜椭圆(对称于 y=x 或 y=−x)。
10.4 椭圆轨迹的详细分析
对于一般相位差 Δφ,轨迹椭圆的性质:
椭圆的主轴方向
椭圆的主轴与 x 轴的夹角 α 满足:
tan(2α)=A2−B22ABcos(Δφ) 半轴长度
椭圆的两个半轴长度 a 和 b(a≥b)满足:
a2+b2=A2+B2 ab=AB∣sin(Δφ)∣ 运动方向
质点沿椭圆运动的方向取决于 sin(Δφ) 的符号:
sin(Δφ)>0(0<Δφ<π):顺时针方向
sin(Δφ)<0(−π<Δφ<0):逆时针方向
10.5 李萨如图形的应用
测量相位差
如果已知两个方向振动的振幅 A 和 B,通过观察李萨如图形可以确定相位差:
从轨迹方程 (10-2),令 x=0:
B2y2=sin2(Δφ)⇒∣y∣x=0=B∣sin(Δφ)∣ 即椭圆在 y 轴上的截距与振幅 B 之比等于 ∣sin(Δφ)∣。
示波器应用
在示波器上,将两个同频率信号分别输入 X 和 Y 通道,屏幕上显示的就是李萨如图形。通过观察图形形状可以:
判断两个信号的频率比(同频时为椭圆/直线)
测量两个信号的相位差
检测信号频率的稳定性
本章小结:
两个互相垂直、同频率的简谐运动的合运动轨迹由方程 A2x2+B2y2−AB2xycos(Δφ)=sin2(Δφ)描述
Δφ=0 或 π:直线;Δφ=±π/2:正椭圆(A=B 时为圆);其他:倾斜椭圆
李萨如图形广泛应用于示波器和信号分析中
第11章 多个合成与拍现象
本章讨论两类叠加问题:(1) 多个同方向同频率简谐运动的合成;(2) 两个同方向不同频率简谐运动的合成(拍现象)。
11.1 同方向同频率的几个简谐运动的合成
设有 NN 个同方向同频率的简谐运动:
xi=acos(ωt+φi)(i=1,2,…,N) 其中各振动振幅相同(均为 a),相邻振动的相位差为 δ:
φi=(i−1)δ 11.1.1 旋转矢量法
N 个等长矢量首尾相接,形成一个圆弧的一部分。合矢量的大小为:
A=asin(δ/2)sin(Nδ/2)(11-1) 合振动的初相位为所有矢量夹角的"中心":
φ=2(N−1)δ 11.1.2 合振幅的特点
当 δ=0(所有振动同相)时:A=Na(最大,所有振动完全加强)
当 Nδ/2=kπ(kk 为非零整数)时:A=0(合振幅为零,完全抵消)
一般情况下,A 随 δ 周期变化,主极大出现在 δ=0,2π,4π,…
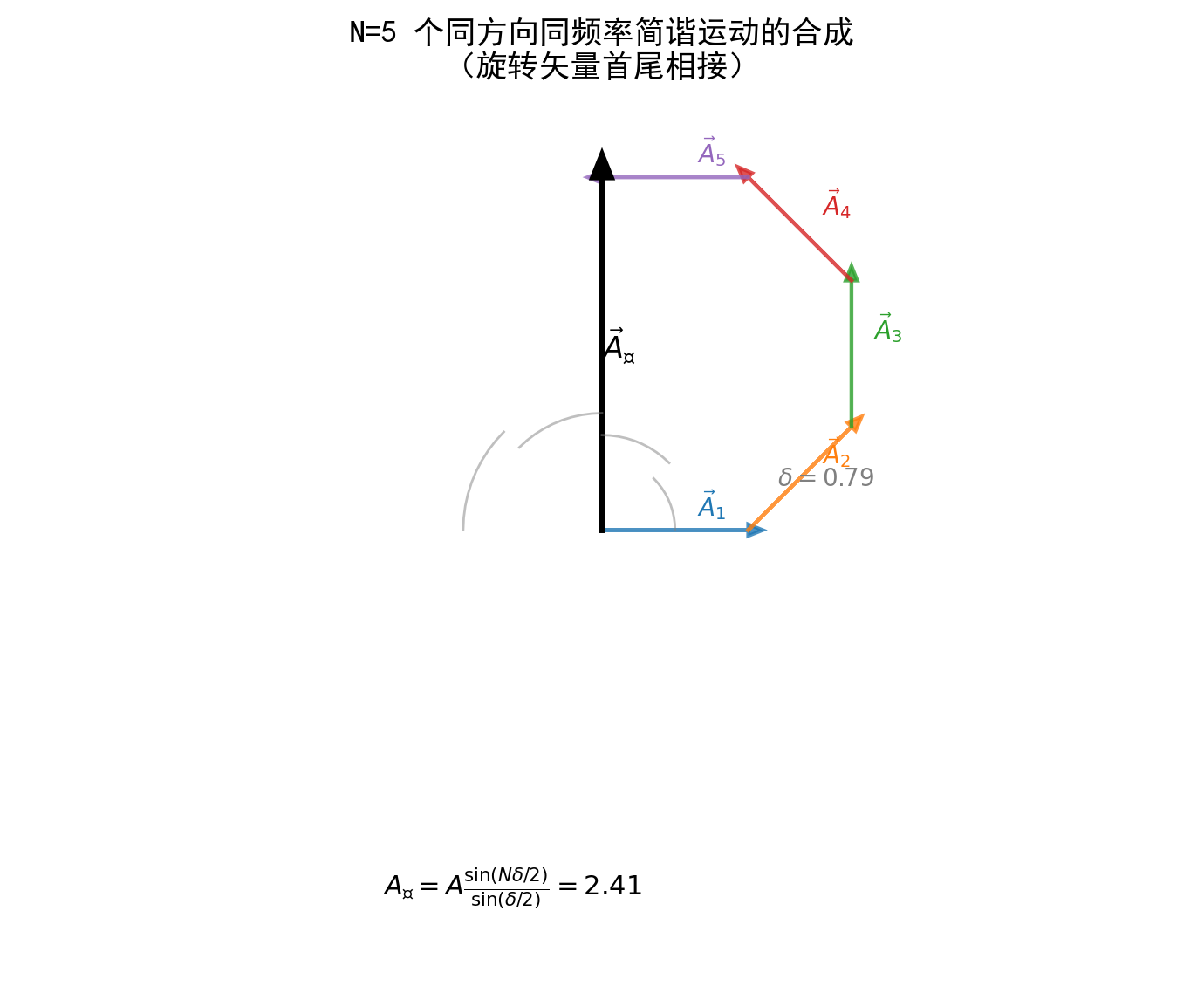
图11-2 N=5 个等振幅、相邻相位差 δ=π/4 的简谐运动的合成。旋转矢量首尾相接形成圆弧的一部分,合矢量(黑色粗箭头)从第一个矢量的起点指向最后一个矢量的终点。合振幅 A合=asin(Nδ/2)/sin(δ/2)=2.41。
应用:这个公式是理解多缝干涉(如光栅衍射)的基础。N 个相干光源的叠加遵循完全相同的数学规律。
11.2 同方向不同频率的两个简谐运动的合成——拍
11.2.1 运动方程
设两个同方向但频率略有不同的简谐运动:
x1x2=Acos(ω1t)=Acos(ω2t) 为简化,设振幅相同且初相位均为零。合位移为:
x=x1+x2=Acos(ω1t)+Acos(ω2t) 利用和差化积公式:
x=2Acos(2ω2−ω1t)cos(2ω2+ω1t)(11-2) 11.2.2 物理诠释
当 ω1 和 ω2 接近时(即 ∣ω2−ω1∣≪ω1+ω2),式 (11-2) 可以理解为:
快变因子:cos(2ω1+ω2t),角频率约为 ω1≈ω2
慢变因子:2Acos(2ω2−ω1t),这是合振动的振幅包络
合振动的位移在快速振荡的同时,振幅以较慢的频率周期性变化,这种现象称为拍(Beats)。
11.2.3 拍频
振幅包络的角频率为:
ω拍=2∣ω2−ω1∣ 但注意:振幅包络的绝对值∣2Acos(ω拍t)∣ 的变化频率是包络角频率的两倍(因为cos 的正负都对应振幅的大小)。因此拍频(单位时间内振幅极大值出现的次数)为:
ν拍=2π∣ω2−ω1∣=∣ν2−ν1∣(11-3) 关键公式:拍频等于两个频率之差的绝对值。
11.2.4 拍的周期
拍的周期(相邻两个振幅极大值之间的时间间隔):
T拍=ν拍1=∣ω2−ω1∣2π(11-4) 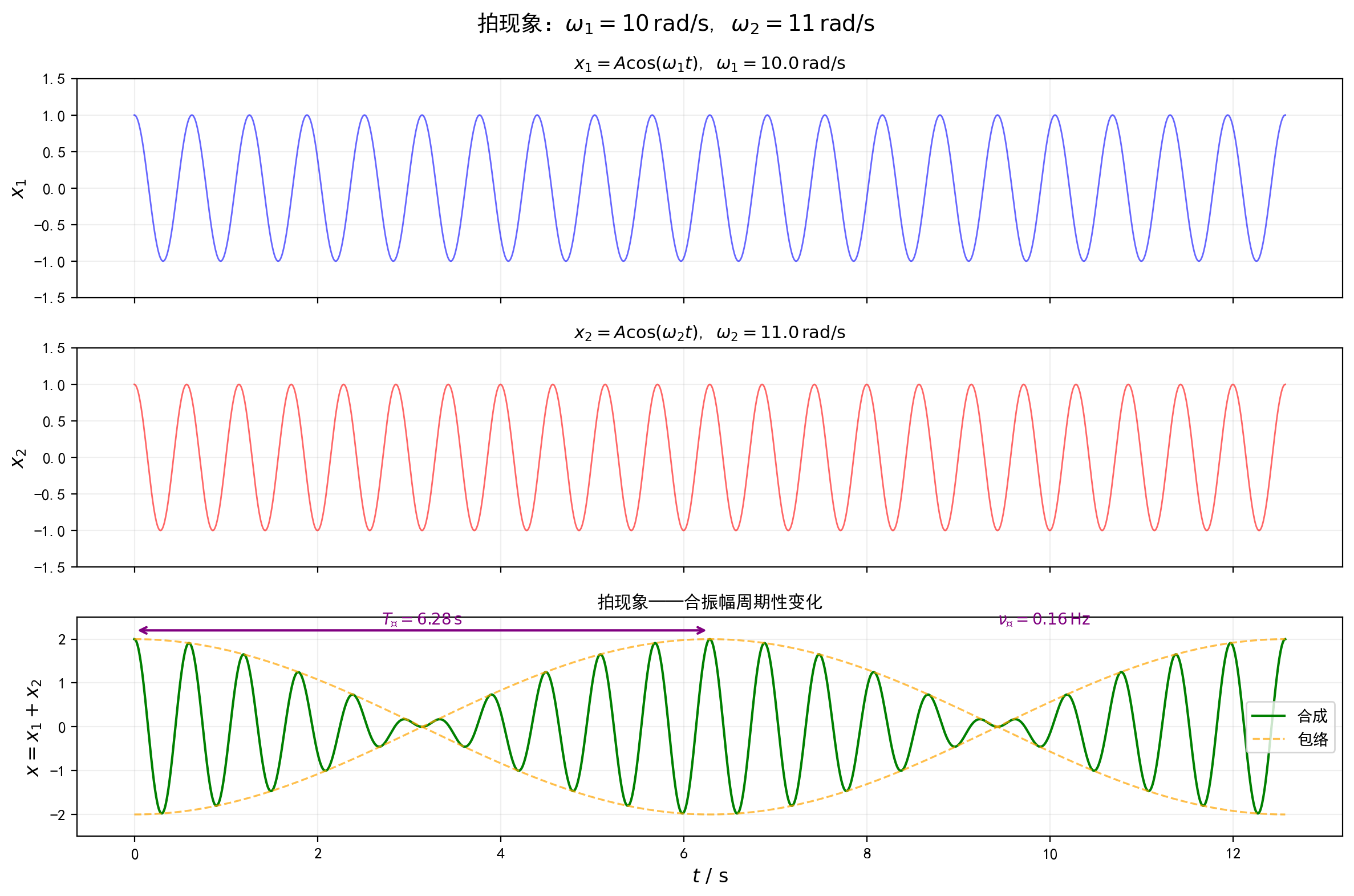
图11-1 拍现象。上两图分别为两个频率接近的分振动(ω1=10rad/s,ω2=11rad/s),下图为合振动。橙色虚线为振幅包络2Acos[(ω2−ω1)t/2]。可以看到合振动的振幅周期性地加强和减弱——这就是拍现象。拍周期T拍=2π/∣ω2−ω1∣≈6.28s,拍频ν拍=∣ν2−ν1∣≈0.16Hz。
11.2.5 拍的应用
乐器调音:两个音调接近的音叉同时发声时产生拍,通过听拍的快慢来判断频率差,进而调整到完全同频
测量未知频率:用已知频率的音叉与未知频率的音叉比较,通过拍频确定未知频率
无线电技术:外差接收机利用拍频原理将高频信号转换为低频信号进行处理
激光测距:利用两束频率略有不同的激光的拍频来测量距离
本章小结:
N 个同方向同频率等振幅振动的合成:A=asin(Nδ/2)/sin(δ/2)
拍现象:两个频率接近的振动合成后振幅周期性变化
拍频 ν拍=∣ν2−ν1∣
合振动表达式 x=2Acos[(ω2−ω1)t/2]cos[(ω2+ω1)t/2]
第12章 阻尼振动
实际的振动系统不可避免地受到阻力(如空气阻力、摩擦力、内耗等),导致振幅逐渐衰减。这种振幅衰减的振动称为阻尼振动(Damped Vibration)。
12.1 阻尼振动的微分方程
考虑弹簧振子,除弹性回复力−kx 外,还受到与速度成正比的阻力−bx˙(粘滞阻力模型,低速时成立)。
由牛顿第二定律:
mx¨=−kx−bx˙ 整理得:
x¨+mbx˙+mkx=0 令ω02=k/m(系统的固有角频率,即无阻尼时的角频率),2β=b/m(阻尼系数),得到标准形式:
x¨+2βx˙+ω02x=0(12-1) 12.2 三种阻尼状态
方程 (12-1) 的特征方程为r2+2βr+ω02=0,特征根为:
r=−β±β2−ω02 根据β 与ω0 的大小关系,分为三种情况。
12.2.1 欠阻尼(β<ω0)
特征根为一对共轭复数:r=−β±iωd,其中ωd=ω02−β2 为阻尼角频率。
通解为:
x(t)=Ae−βtcos(ωdt+φ)(12-2) 特点:
12.2.2 临界阻尼(β=ω0)
特征根为重根:r=−β(二重根)。
通解为:
x(t)=(C1+C2t)e−βt(12-3) 特点:
12.2.3 过阻尼(β>ω0)
特征根为两个不同的负实数:r1=−β+β2−ω02,r2=−β−β2−ω02。
通解为:
x(t)=C1er1t+C2er2t(12-4) 特点:
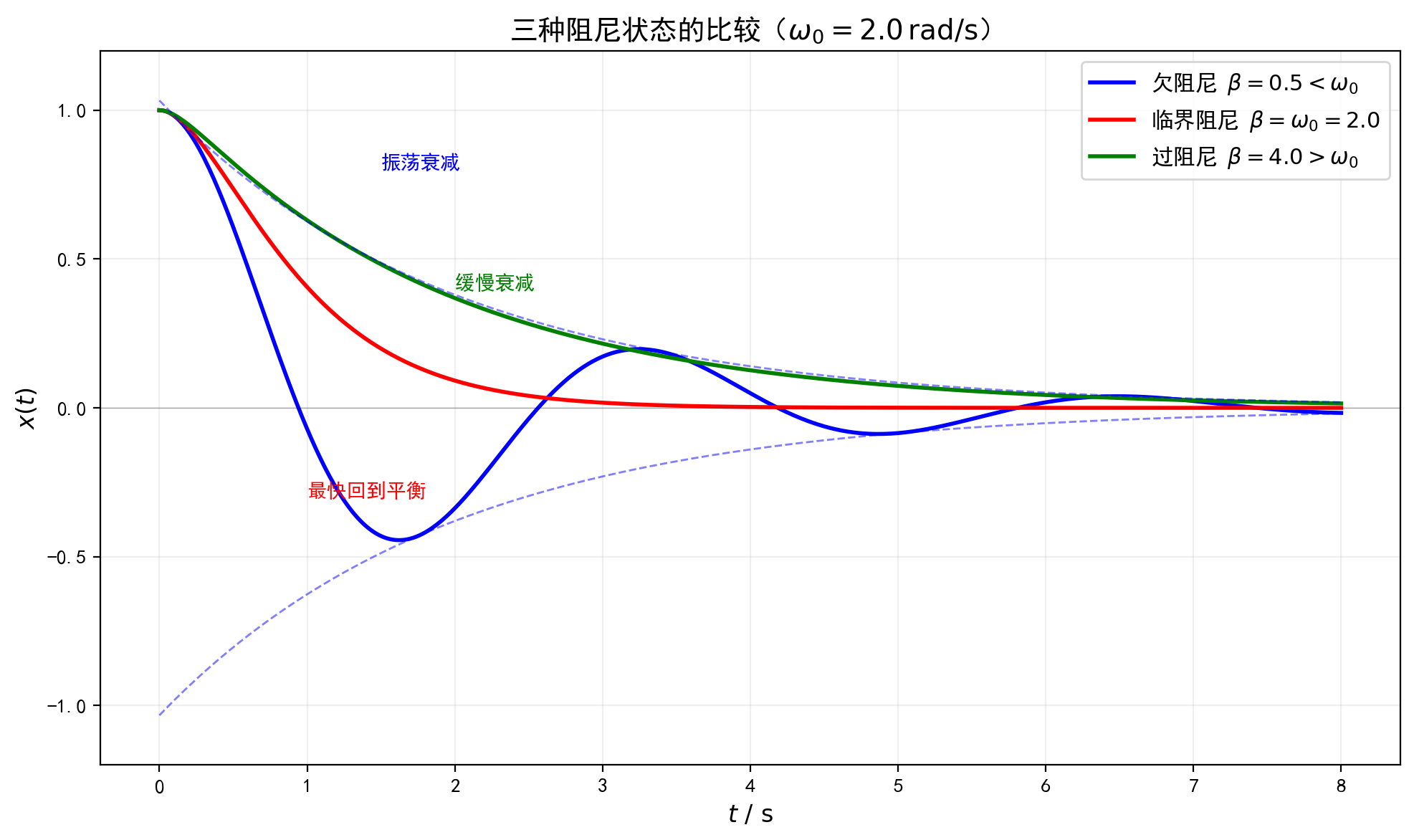
图12-1 三种阻尼状态的位移-时间曲线(ω0=2.0rad/s,初始条件 x0=1,v0=0)。欠阻尼(蓝色)表现为振幅衰减的振荡;临界阻尼(红色)不振荡且最快回到平衡位置;过阻尼(绿色)不振荡且衰减缓慢。
12.3 欠阻尼振动的详细分析
阻尼角频率
ωd=ω02−β2<ω0 阻尼周期:
Td=ωd2π=ω02−β22π>T0=ω02π 即阻尼使周期变长(振动变慢)。
振幅衰减
振幅随时间指数衰减:
A(t)=A0e−βt 对数减缩
对数减缩(Logarithmic Decrement)定义为相邻两个振幅之比的自然对数:
δ=ln(An+1An)=ln(A0e−β(tn+Td)A0e−βtn)=βTd(12-5) 对数减缩是衡量阻尼大小的实验可测量——通过测量相邻振幅的比值即可确定 β。
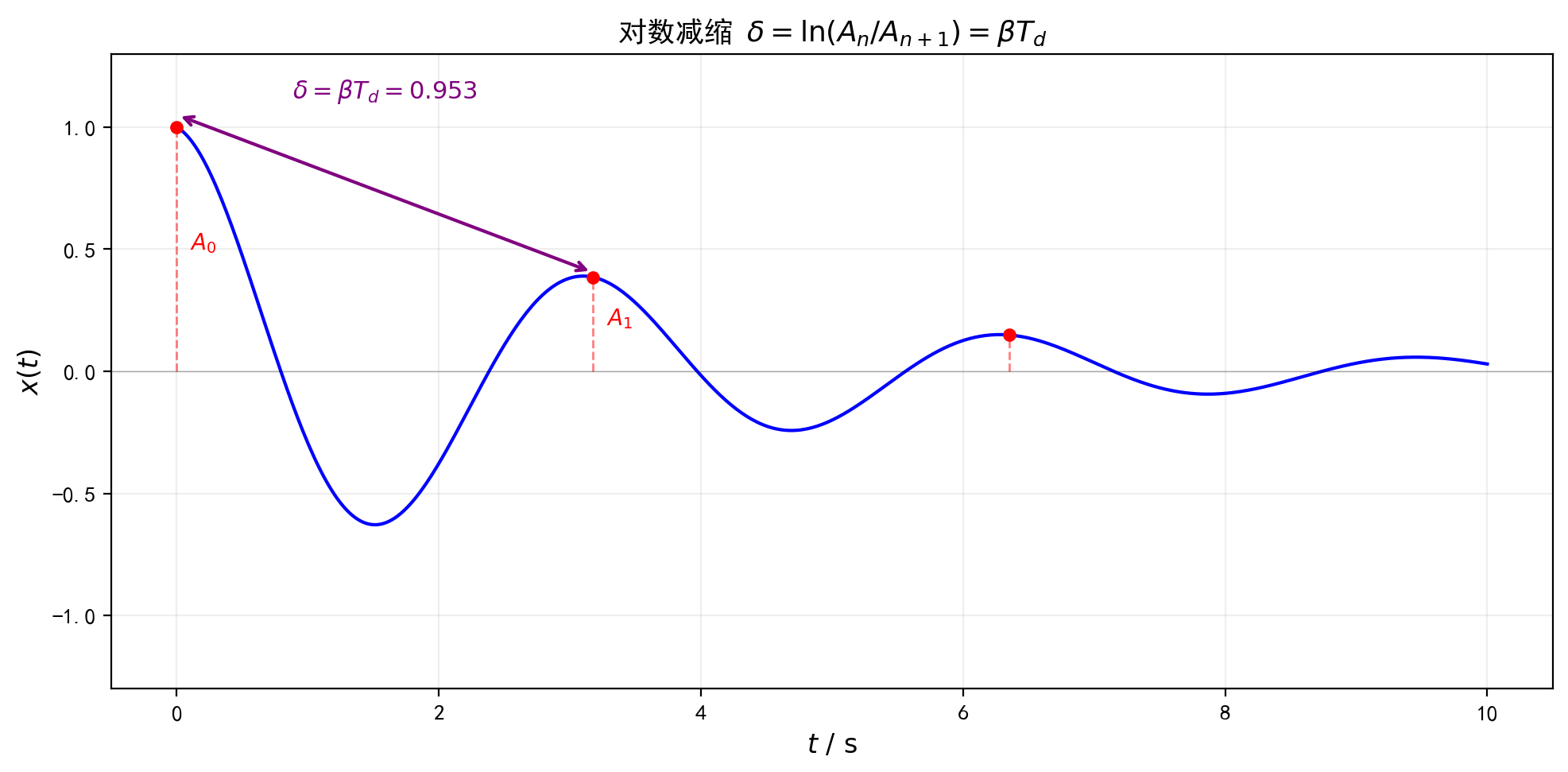
图12-2 欠阻尼振动的对数减缩。红色标记为相邻振幅峰值 A0 和 A1。对数减缩 δ=ln(A0/A1)=βTd=0.953。
品质因数
品质因数(Quality Factor)Q 是衡量振动系统能量损耗快慢的无量纲量:
Q=2βω0=δπ(12-6) Q 越大,阻尼越小,振动衰减越慢
Q→∞:无阻尼(理想简谐运动)
对于欠阻尼振动,Q>1/2
本章小结:
阻尼振动方程:x¨+2βx˙+ω02x=0
欠阻尼(β<ω0):x=Ae−βtcos(ωdt+φ),振幅衰减的振荡
临界阻尼(β=ω0):最快回到平衡位置,不振荡
过阻尼(β>ω0):缓慢回到平衡位置,不振荡
对数减缩 Q=ω0/(2β)
第13章 受迫振动与共振
当振动系统在持续的周期性外力(驱动力)作用下振动时,称为受迫振动(Forced Vibration)。受迫振动最引人注目的现象是共振——当驱动力频率接近系统固有频率时,振幅急剧增大。
13.1 受迫振动的微分方程
考虑一个有阻尼的弹簧振子,同时受到周期性驱动力F(t)=F0cos(ωt) 的作用(ω 为驱动力的角频率)。
运动方程为:
mx¨=−kx−bx˙+F0cos(ωt) 整理得:
x¨+2βx˙+ω02x=mF0cos(ωt)(13-1) 其中ω02=k/m,2β=b/m。
这是一个二阶常系数非齐次线性微分方程。
13.2 方程的解
方程 (13-1) 的通解由两部分组成:
x(t)=xh(t)+xp(t) 稳态解
经过足够长的时间后,瞬态解衰减为零,系统进入稳态受迫振动。设稳态解为:
xp(t)=Acos(ωt+φ)(13-2) 代入方程 (13-1),比较系数可得稳态振幅和相位:
A=(ω02−ω2)2+4β2ω2F0/m(13-3) φ=arctan(ω02−ω22βω)(13-4) 关键:稳态受迫振动是以驱动力频率 ω 振动的简谐运动(不是以固有频率 ω0),其振幅 A 和相位 φ 由驱动力频率决定。
13.3 幅频特性——共振曲线
稳态振幅 A 随驱动力频率 ω 的变化曲线称为幅频特性曲线(或共振曲线)。
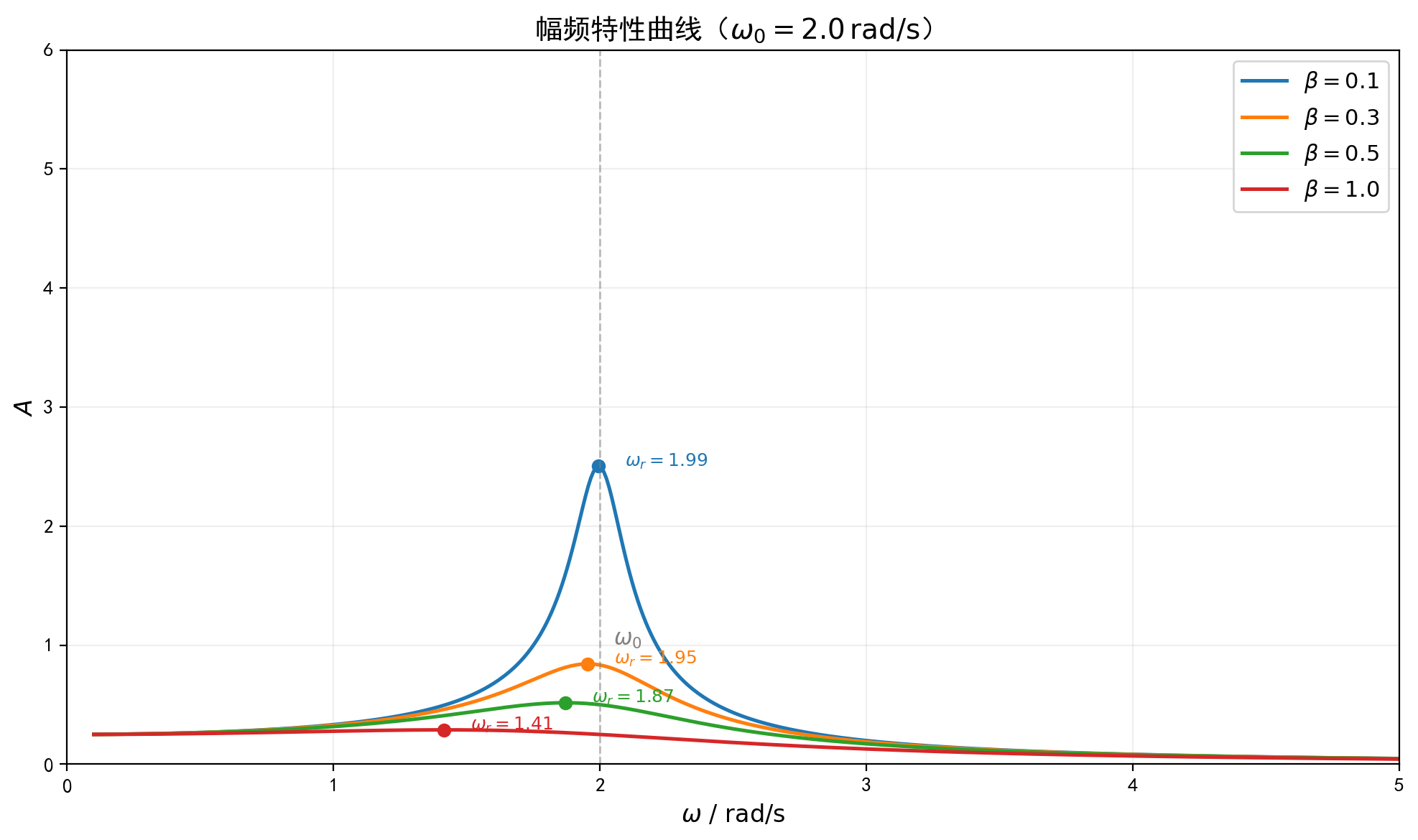
图13-1 不同阻尼下的幅频特性曲线(ω0=2.0rad/s)。阻尼越小,共振峰越尖锐、越高。共振频率 ωr=ω02−2β2 略小于固有频率 ω0(图中虚线标注)。当阻尼较大时(β=1.0),共振峰消失,振幅单调下降。
共振频率
对A(ω) 求导,令dA/dω=0,可得振幅最大时的频率(共振频率):
ωr=ω02−2β2(13-5) 当β<ω0/2 时存在共振峰;当β≥ω0/2 时振幅单调下降,无共振。
13.4 相频特性
相位差 φ(振动位移相对于驱动力的滞后)随驱动力频率 ω 的变化称为相频特性。
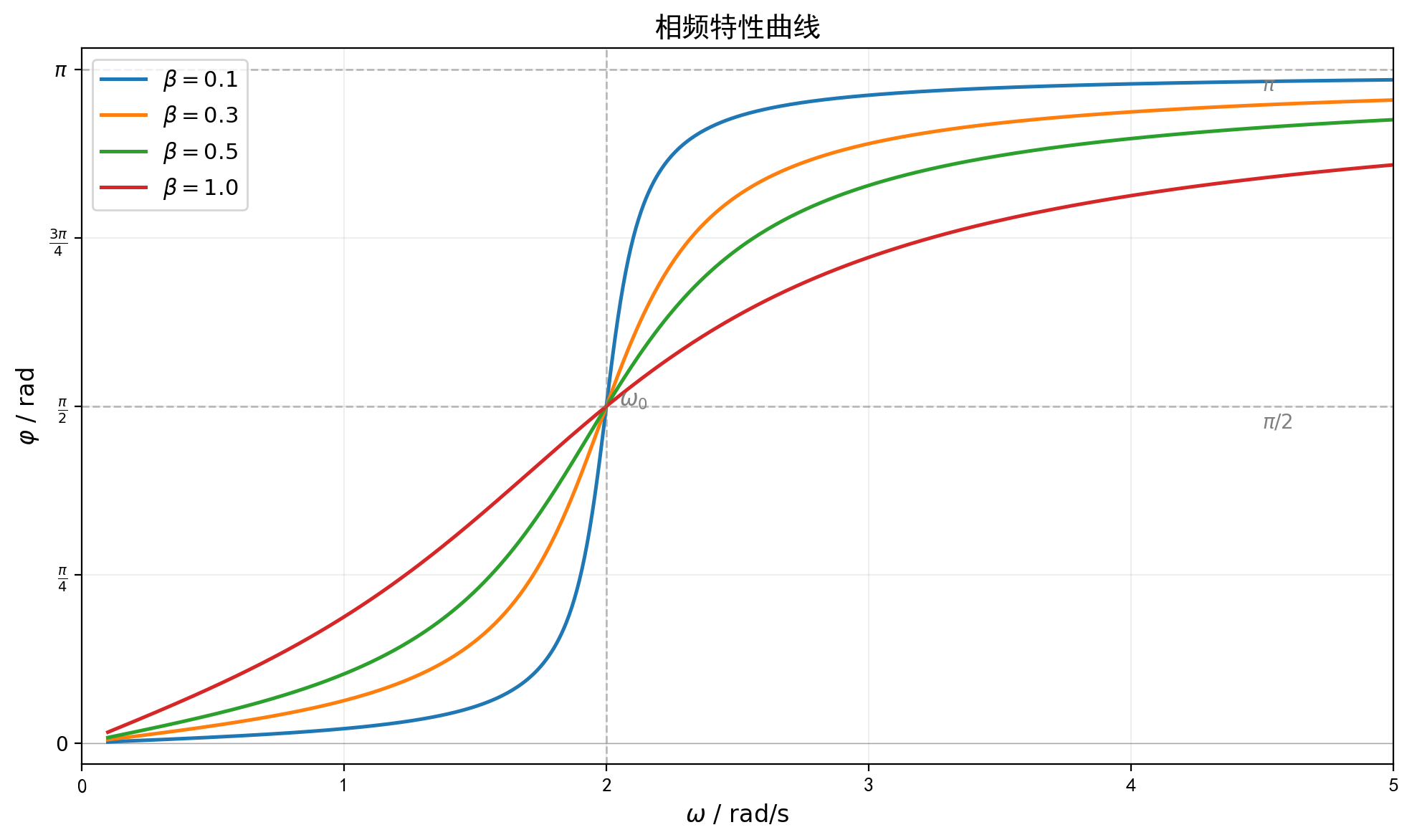
图13-2 不同阻尼下的相频特性曲线。所有曲线都通过点 (ω0,π/2)——在共振时,位移滞后驱动力 90∘90∘。阻尼越小,相位在 ω0 附近的变化越陡峭。
三个极限情况
频率范围 | ω→0 | ω=ω0 | ω→∞ |
|---|
振幅 A | F0/k(静位移) | Amax | →0 |
相位 φ | 0(同相) | π/2 | π(反相) |
物理含义 | 弹簧力主导 | 阻尼力主导 | 惯性力主导 |
13.5 共振的能量解释
在共振时,驱动力始终在物体速度最大的时刻做正功,效率最高。从能量角度看:
驱动力在一个周期内做的功:W=∫0TF(t)v(t)dt
当 ω=ω0 时,F 与 v 同相(因为 x 滞后 F 为 π/2,而 v 超前 x 为 π/2,故 v 与 F 同相),做功效率最大
当 ω=ω0 时,F 与 v 存在相位差,做功效率降低
13.6 速度共振与位移共振
位移共振
即上面讨论的振幅最大,共振频率 ωr=ω02−2β2。
速度共振
速度振幅 vmax=ωA。对ωA求极值,得:
ωv=ω0 即速度共振发生在驱动力频率等于固有频率时,与位移共振略有不同。
加速度共振
加速度振幅 amax=ω2A。对 ω2A 求极值,得:
ωa=1−2β2/ω02ω0>ω0 13.7 共振的应用与危害
应用
核磁共振(NMR):原子核在特定频率的电磁波作用下发生共振吸收
微波炉:微波频率与水分子的固有频率共振,高效加热食物
乐器:共鸣箱利用共振放大声音
无线电调谐:LC电路在特定频率共振,选择性地接收信号
危害
桥梁共振:1831年英国士兵齐步走过桥引起共振导致桥梁坍塌(此后军队过桥改便步走)
机械共振:发动机转速与结构固有频率一致时引起剧烈振动
Tacoma 海峡大桥:1940年因风致共振而倒塌(虽然严格来说是气动弹性颤振)
本章小结:
受迫振动方程:x¨+2βx˙+ω02x=(F0/m)cos(ωt)
稳态解:xp=Acos(ωt+φ),以驱动力频率振动
位移共振频率 ωr=ω02−2β2,阻尼越小共振峰越尖锐
共振时位移滞后驱动力 π/2,速度与驱动力同相,能量传递效率最高
速度共振发生在 ω=ω0,位移共振发生在 ωr<ω0。
第14章 电磁振荡
电磁振荡是电路中电荷和电流的周期性变化,与机械振动在数学上完全等价。本章讨论理想的 LC 振荡电路(无电阻,无阻尼)。
14.1 LC 振荡电路
电路描述
LC 振荡电路由电感 L 和电容 C 串联组成。初始时电容器充有电荷 q0,然后通过电感放电,形成电磁振荡。
将电容器充电至电荷 q0 后与电感 L 连接成回路(无电阻)。电容器储存电场能,电感储存磁场能。能量在两者之间往复转换,形成电磁振荡。
14.2 无阻尼自由电磁振荡方程
回路方程
设某时刻电容器上的电荷为 q,回路中的电流为 i。由基尔霍夫电压定律:
电容器两端电压:UC=Cq
电感两端电压:UL=Ldtdi=Ldt2d2q(因为i=dtdq)
回路电压之和为零:
Ldt2d2q+Cq=0 即:
dt2d2q+LC1q=0(14-1) 与简谐运动的对比
方程 (14-1) 与简谐运动方程 x¨+ω02x=0 形式完全相同!
令:
ω02=LC1(14-2) 则:
dt2d2q+ω02q=0 其通解为:
q(t)=Q0cos(ω0t+φ)(14-3) 电流为:
i(t)=dtdq=−Q0ω0sin(ω0t+φ)(14-4) 振荡角频率:
ω0=LC1(14-5) 振荡周期和频率:
T=2πLC,ν=2πLC1(14-6) 14.3 无阻尼自由电磁振荡的能量
电场能
电容器储存的电场能:
EE=2Cq2=2CQ02cos2(ω0t+φ)(14-7) 磁场能
电感储存的磁场能:
EB=21Li2=21LQ02ω02sin2(ω0t+φ) 利用ω02=1/(LC),即Lω02=1/C:
EB=2CQ02sin2(ω0t+φ)(14-8) 总能量
E=EE+EB=2CQ02[cos2(ω0t+φ)+sin2(ω0t+φ)]=2CQ02(14-9) 总能量守恒! 电场能和磁场能周期性转换,但总和不变。
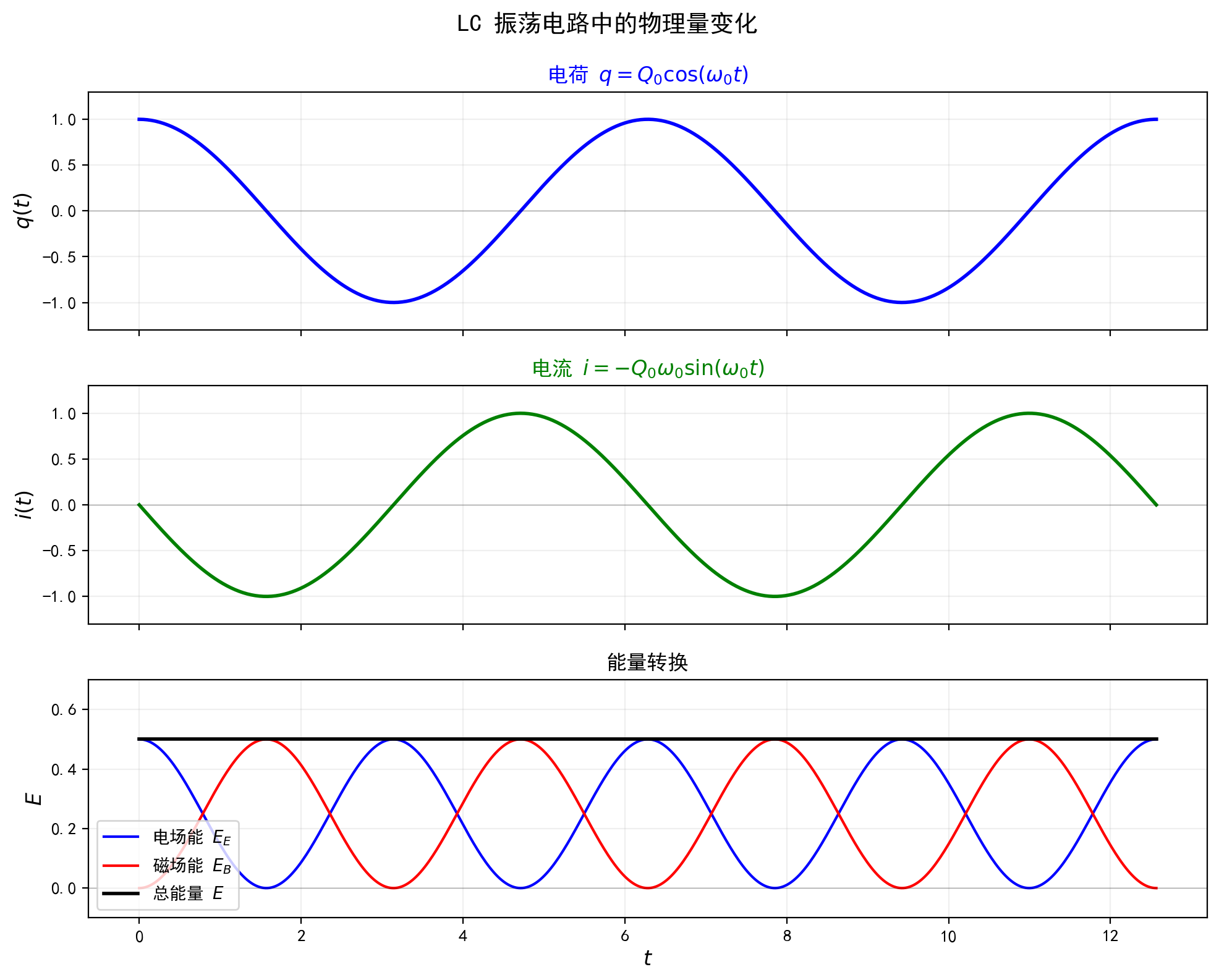
图14-2 LC 振荡电路中各物理量随时间的变化(L=C=1)。上:电荷 q 按余弦规律变化;中:电流 i 按正弦规律变化,相位超前电荷 π/2;下:电场能 EE 和磁场能 EB 以频率 2ω0 周期性转换,总能量恒定。
能量转换过程
时刻 | 电荷 q | 电流 i | 电场能 EE | 磁场能 EB |
|---|
t=0 | Q0(最大) | 0 | 最大 | 0 |
t=T/4 | 0 | −Q0ω0(最大) | 0 | 最大 |
t=T/2 | −Q0(最大) | 0 | 最大 | 0 |
t=3T/4 | 00 | Q0ω0(最大) | 0 | 最大 |
电容器充满电时:电场能最大,磁场能为零
电容器放电完毕时:电场能为零,磁场能最大
能量在电场和磁场之间往复转换
14.4 机械振动与电磁振荡的类比
这是物理学中最重要的类比之一——两个完全不同的物理系统遵循相同的数学规律。
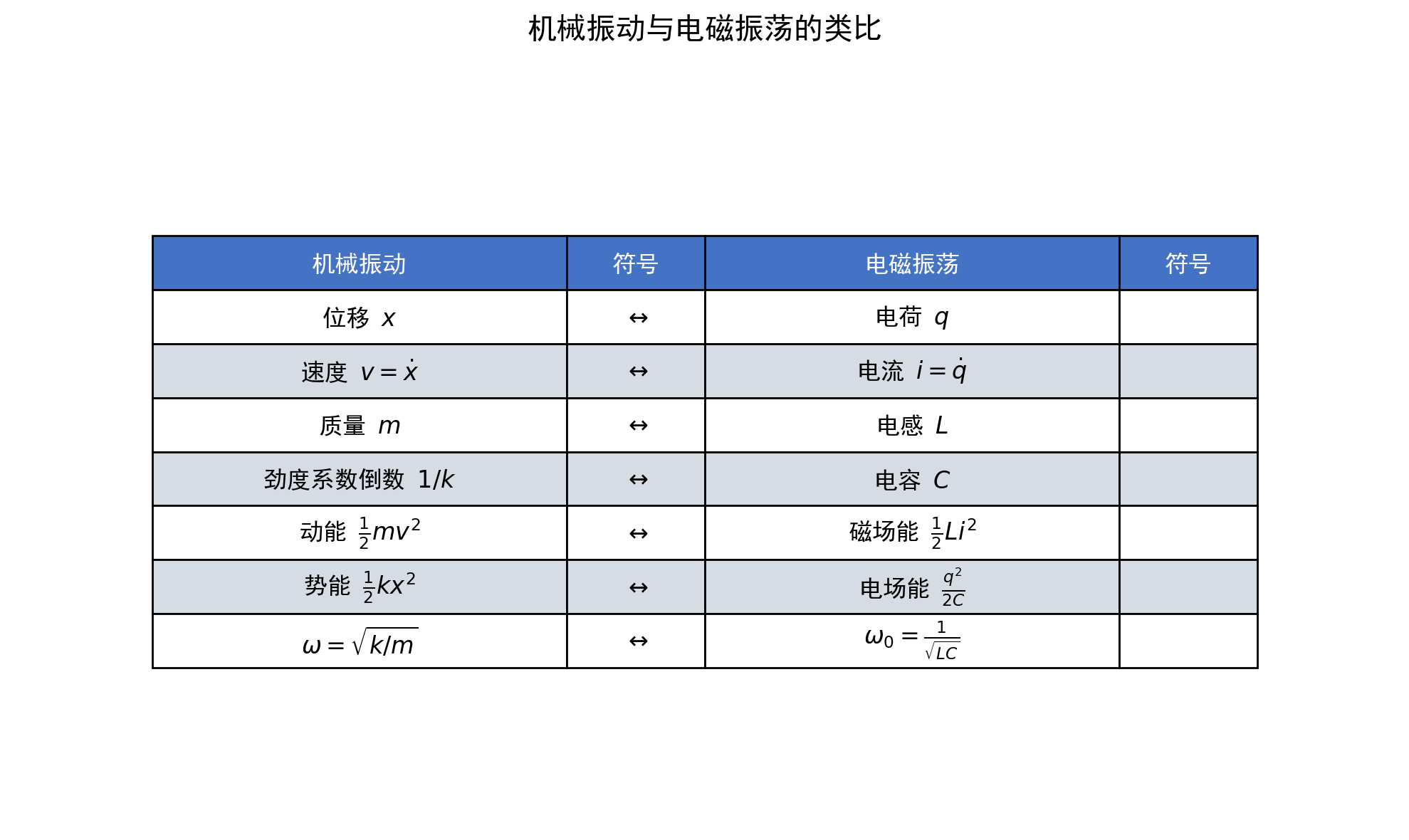
图14-3 机械振动与电磁振荡的一一对应关系。位移 x 对应电荷 q,质量 m 对应电感 L,劲度系数的倒数 1/k 对应电容 C,动能对应磁场能,势能对应电场能。
物理含义
质量 m ↔ 电感 L:都体现"惯性"——质量抵抗速度变化,电感抵抗电流变化
弹簧 1/k ↔ 电容 C:都体现"储存势能"的能力——弹簧储存弹性势能,电容储存电场能
阻尼 b ↔ 电阻 R:都体现能量耗散——摩擦生热 vs 焦耳热
重要意义:这种类比使得我们可以将机械振动的全部理论直接移植到电磁振荡中。阻尼振动、受迫振动、共振等概念在电磁振荡中都有完全对应的形式。
14.5 有电阻的 LC 电路(RLC 电路)
当电路中存在电阻R 时,回路方程变为:
Ldt2d2q+Rdtdq+Cq=0 即:
q¨+LRq˙+LC1q=0 与阻尼振动方程x¨+2βx˙+ω02x=0 对比:
-ω02=1/(LC)(固有角频率)
-2β=R/L(阻尼系数)
电阻导致电磁振荡的能量逐渐耗散(焦耳热),振幅指数衰减——这就是阻尼电磁振荡,与机械阻尼振动完全类比。
本章小结:
- LC 振荡电路方程:Lq¨+q/C=0,与简谐运动方程完全类比
- 振荡角频率ω0=1/LC
- 电场能EE=q2/(2C) 和磁场能EB=Li2/2 周期性转换,总能量守恒
- 机械振动与电磁振荡有完整的物理量类比关系
第15章 非线性系统简介
前十四章讨论的所有振动系统都是线性的——回复力与位移成正比(F=−kxF=−kx),运动方程为线性微分方程,满足叠加原理。然而,自然界中大多数实际振动系统本质上是非线性的。本章简要介绍非线性振动的特点。
15.1 线性与非线性的区别
线性振动
非线性振动
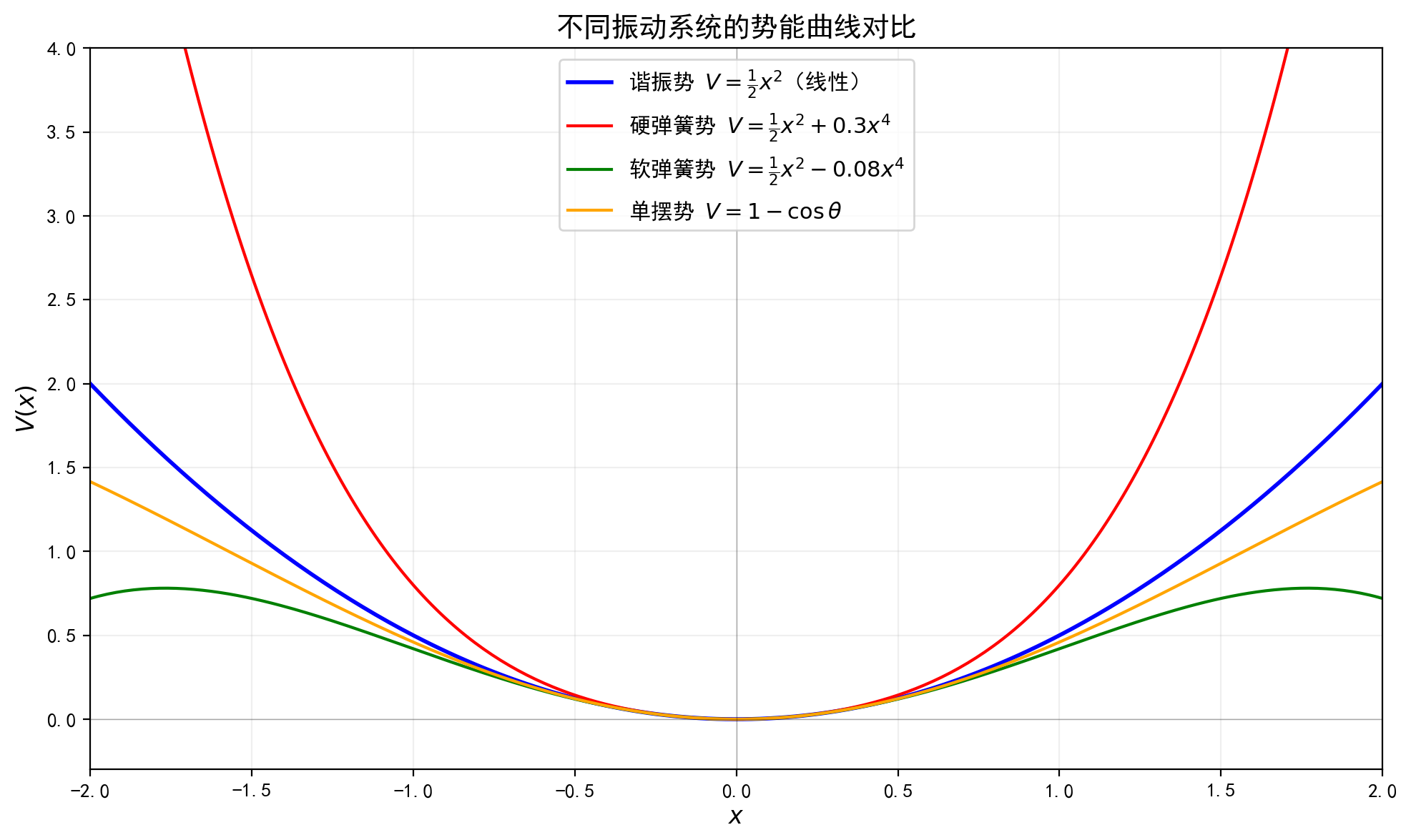
图15-1 不同振动系统的势能曲线。蓝色为谐振势(线性),在原点附近所有势能曲线都近似为抛物线。红色为硬弹簧势(劲度系数随位移增大而增大),绿色为软弹簧势(劲度系数随位移增大而减小),橙色为单摆势。可以看出:小位移时所有曲线都接近谐振势;大位移时差异显著。
15.2 非线性振动的来源
15.2.1 几何非线性
单摆的回复力为 Fτ=−mgsinθ,当 θ 较大时 sinθ≠θ:
θ¨+lgsinθ=0 这是非线性方程。其周期与振幅有关——振幅越大,周期越长。
15.2.2 材料非线性
实际弹簧的弹性力并非严格的 F=−kx,大变形时可能出现:
15.2.3 非线性阻尼
实际阻尼力可能不是简单的 Fd=−bx˙,例如空气阻力在高速时与速度的平方成正比:Fd=−cx˙∣x˙∣。
15.3 非线性振动的特点
(1) 周期依赖于振幅
对于非线性振动,振动周期通常是振幅的函数。例如单摆的精确周期为:
T=4glK(sin2θ0) 其中 K 为完全椭圆积分,θ0 为最大摆角。当 θ0→0 时 T→2πl/g;当 θ0 增大时 T 也增大。
(2) 频率成分丰富
线性简谐运动只有单一频率成分。非线性振动的运动可以分解为基频及其谐波(整数倍频率)的叠加:
x(t)=A1cos(ωt)+A2cos(2ωt)+A3cos(3ωt)+⋯ 振幅越大,高次谐波的贡献越显著。
(3) 不满足叠加原理
两个非线性振动的叠加不再是一个简单的振动。这使得非线性系统的分析远比线性系统复杂。
15.4 范德波尔振子
范德波尔振子(Van der Pol Oscillator)是最著名的非线性振动模型之一,由荷兰物理学家 Balthasar van der Pol 于 1920 年提出,用于描述电子管振荡电路。
运动方程
x¨−μ(1−x2)x˙+x=0(15-1) 其中 μ>0 为非线性阻尼参数。
特点
当 ∣x∣<1 时,−μ(1−x2)<0,阻尼为负——系统从外界吸收能量,振幅增大
当 ∣x∣>1 时,−μ(1−x2)>0阻尼为正——系统耗散能量,振幅减小
最终系统会稳定在一个特定的振幅上,形成极限环(Limit Cycle)
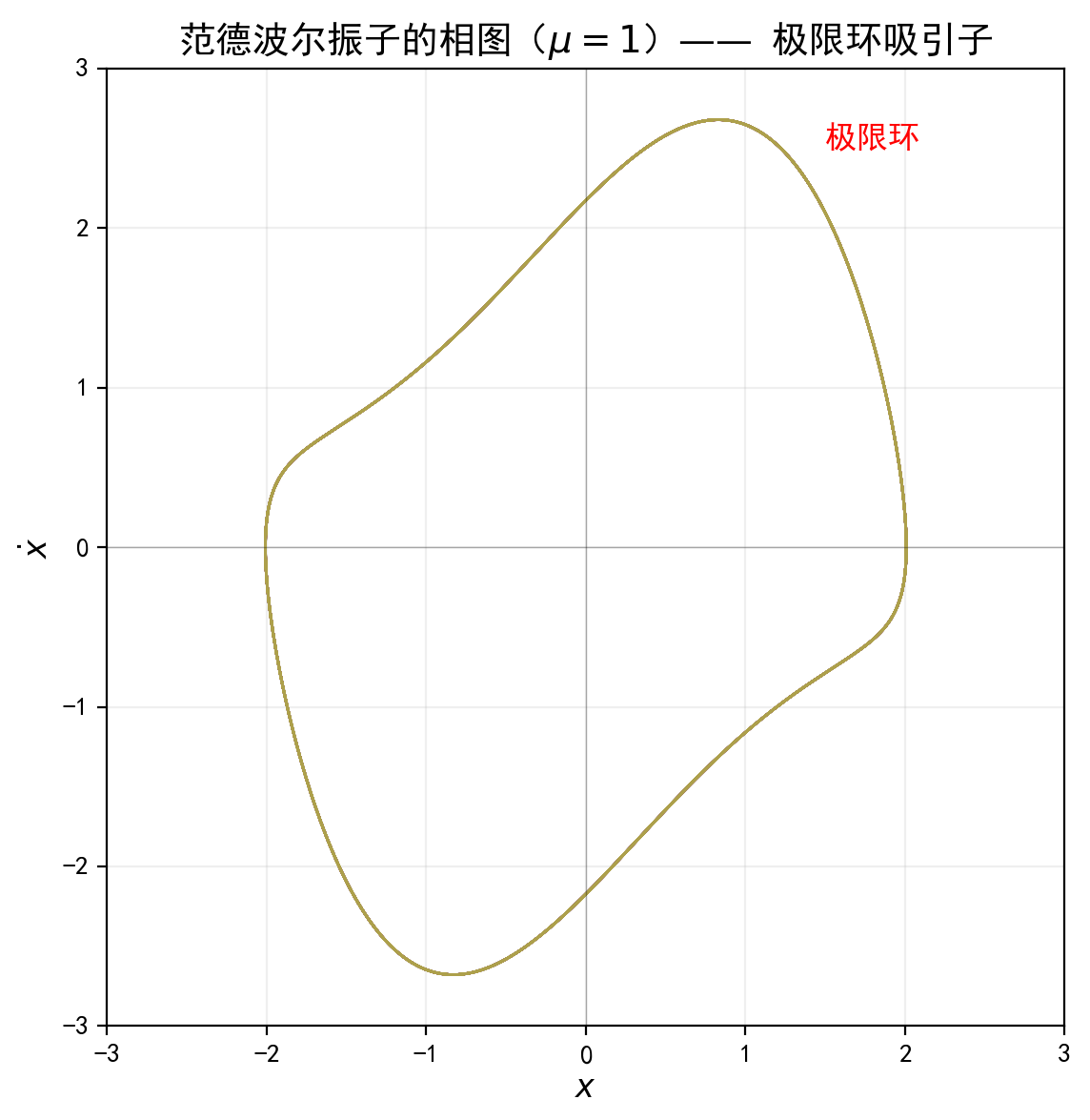
图15-2 范德波尔振子(μ=1)的相图。无论初始条件如何(图中从 9 个不同初始点出发),系统最终都收敛到同一条闭合曲线——极限环。极限环是稳定的周期运动,是吸引子的一种。这与线性振子的椭圆相轨迹(振幅由初始条件决定)形成鲜明对比。
极限环的物理意义
15.5 混沌简介
当非线性系统受到周期性驱动力作用时,可能出现混沌(Chaos)现象——看似随机的、对初始条件极其敏感的非周期运动。
混沌的特征
对初始条件敏感:初始条件的微小差异随时间指数放大("蝴蝶效应")
长期不可预测:虽然运动由确定性方程描述,但长期行为无法预测
奇怪吸引子:相空间中的轨迹既不闭合也不发散,而是在有限区域内永不重复地运动
分形结构:奇怪吸引子具有分形几何特征
经典例子
混沌的意义
混沌理论告诉我们:确定性 ≠ 可预测性。即使运动方程是完全确定的,系统的长期行为也可能本质上不可预测。这一认识深刻影响了气象学、天体力学、生物学等多个领域。
15.6 从线性到非线性的过渡
线性振动是非线性振动在平衡位置附近小幅度振动的近似。回顾泰勒展开:
f(x)=f(0)+f′(0)x+2f′′(0)x2+6f′′′(0)x3+⋯ 在平衡位置x=0 处,f(0)=0(平衡条件)。保留到线性项:
f(x)≈f′(0)x=−kx 这就是线性近似。当振幅增大时,高次项(x2,x3,…)的贡献不可忽略,线性近似失效,必须考虑非线性效应。
本章小结:
线性振动:F=−kx,满足叠加原理,周期与振幅无关
非线性振动:回复力不是严格的线性函数,不满足叠加原理
单摆大角度、硬/软弹簧都是常见的非线性振动源
范德波尔振子展示自激振荡和极限环现象
混沌是非线性受迫振动中出现的对初始条件敏感的复杂行为
线性振动是非线性振动在小振幅条件下的近似
全教程总结
本教程系统介绍了大学物理中振动章节的核心内容:
简谐运动基础:从线性回复力出发,建立简谐运动的数学框架
描述参量:振幅、周期、频率、相位——完整刻画振动状态
旋转矢量法:将一维振动与二维圆周运动联系,使相位直观化
具体实例:弹簧振子、单摆、物理摆——理论联系实际
能量视角:动能与势能的周期性转换,总能量守恒
振动合成:叠加原理的应用——同方向合成、李萨如图形、拍现象
阻尼与受迫:从理想走向实际——能量耗散与外部驱动
共振:频率匹配时的振幅放大,应用与危害并存
电磁振荡:LC 电路与机械振动的完美类比
非线性拓展:超越线性近似,认识更丰富的振动世界
振动的核心思想可以归结为一句话:线性回复力 + 惯性 = 周期性往复运动。这个简单的原理贯穿了从弹簧到原子、从单摆到电磁波、从经典力学到量子力学的广阔领域。